
Bmw помогает построить самый быстрый дрон
Обновлено: 05.07.2024
«Собрать большой коптер ничего о них не зная?» — да ерунда
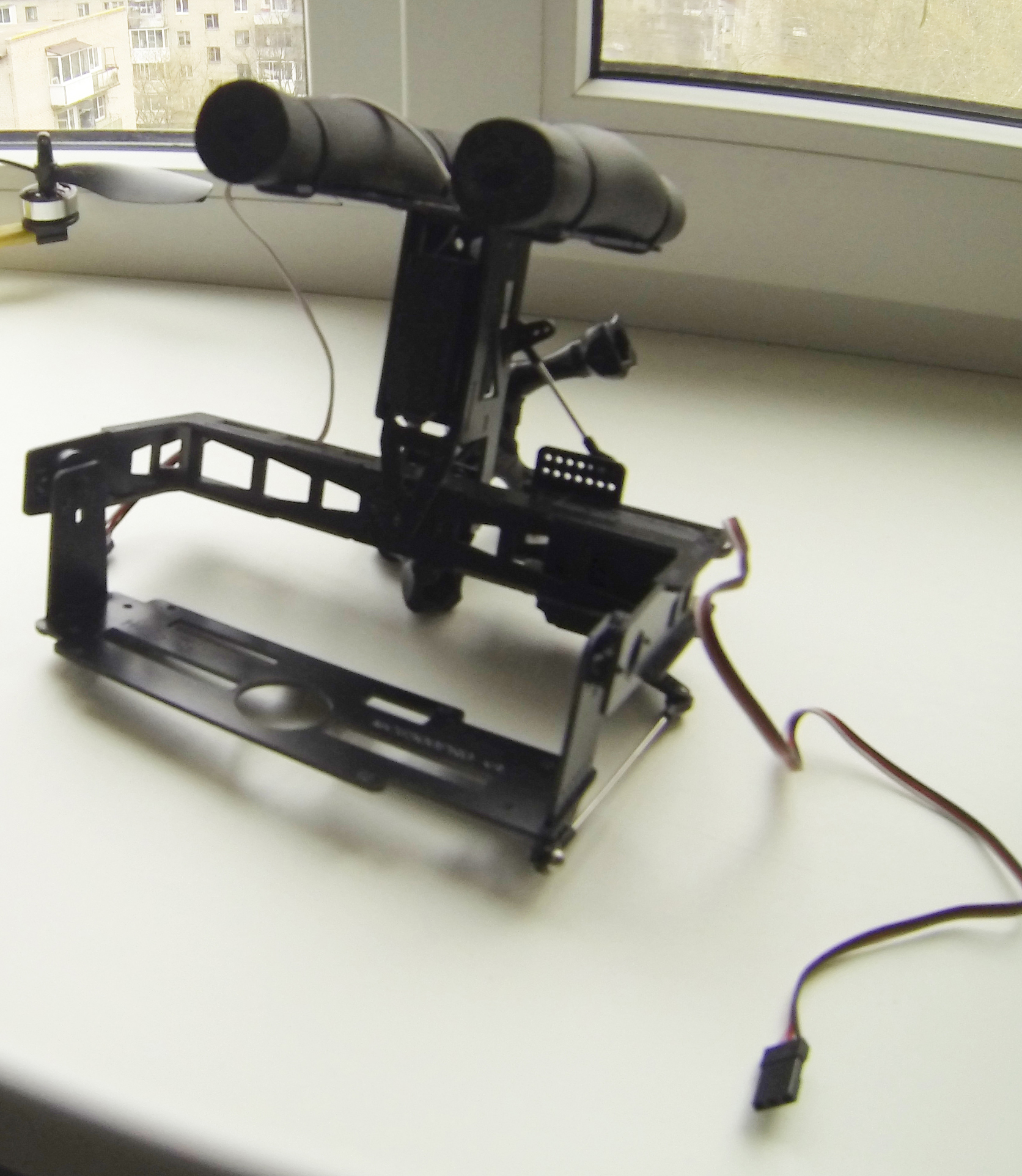
Думаю все заметили, что в интернете достаточно много статей про квадрики мелкого размера: тесты, обзоры и т. д. А вот тестов больших коптеров маловато. Думаю в основном потому, что большой коптер – это чаще всего индивидуальная постройка (не всегда, но часто). Поэтому я решил написать про свой личный «самосбор» – гексакоптер на раме tarotfy680. В качестве предыстории хочу рассказать о том как я собирал этот коптер с нулевыми знаниями. За три года он претерпел много модификаций: от мелких до полной смены «тяговой начинки».

Итак, все началось когда я решил заниматься аэросъемкой. На то время у меня был куплен небольшой «шальной» квадрокоптер, на котором я научился немного летать и, как я понял позже, вообще, не годится для съемки, т. к. грузоподъемности не хватало для необходимого оборудования. В итоге пришла идея собрать свой коптер. Русскому же человеку покупать готовый дорого, и амбиций что соберет «дешевле» достаточно. :)
В итоге с другом «поскребли по сусекам» и нашли немного денег на покупку деталей. Все заказывал с Китая, в основном Ebay и Hobbyking. Ссылки на первые сетапы уже не найду, давно это было. И через пару месяцев ожидания (тогда почта работала хуже чем сейчас) мне выдали все посылки. Огромная рама! Огромные винты! Аккумуляторы тяжелые! Прямо восторг был после мелкого квадрика. :)
Итак по характеристикам первого сетапа:
- Рама tarotfy680 (с алюминиевыми лучами) Tarot FY680*.
- Моторы Heng Li Brushless Motors W4225 610KV* (тогда еще желтые были).
- Контроллер Naza-mv1 (первая версия назы, которой на ебее практически сейчас и не найти. Lite версия всех перепрыгнула уже. По сути, разницы то и нет).
- Регуляторы RCtimer 30a.
- Аппаратура Turnigy 9xr.
- Модуль и приемник к ней DJT Frsky.
- Пропеллеры карбон 12x6.
- Аккумы Zippycompact 3s 25c 5000mah ( тот еще отстой).
- Видеопередача Boscam 5.8 RC 305 и 200mw передатчик*.
Ссылку на 2х осевой подвес к сожалению не найду, но помню, что он стоил по тем деньгам 6 т. р. и был на сервах)
Итак (помните что знания нулевые) собрал все это чудо. Причем я заменил алюминиевые трубы рамы на 500мм карбоновые трубы. Амбиции о «метровом» коптере меня не покидали…

Сейчас меня пайка контактов того времени ввела бы в ужас, но всё-таки. Коптер был собран. Сделан throttlerange регуляторов (процедура, которая как я понял выравнивает мин/макс значения скорости моторов для каждого регуля) и первый запуск. В тот раз я думал что вижу гексу последний раз. Причиной тому был GPS-компас назы, который был развернут на 180 градусов. Думаю коптероводы прикинут что это такое. :)
Ну да ладно. После доработок, дочиток инструкций и, все же, укорочения труб до нормальной длины — новый тест. Ура! Все полетело. «Ничего себе собрал его все таки» – думал я. Даже failsafe работает. В принципе на этом радостные моменты закончились и начались «неприятки». Наконец-то купил sonynex 5nв Москве. Поставил на подвес. Взлетел и… Снимаю! Снимаю! Эм, нет не снимаю…
Коптер почему-то «проседает». Летит, летит и потом берет и плюхается в траву. Не быстро… но ведь…так не должно быть! Поднимаю повыше – летает, летает….и опять теряет высоту…. Причем бывает так, что достаточно стремительно теряет высоту. В чем дело? Все настройил, все что мог прошерстил… не хочет летать и все. Как оказалось, уже через некоторое время, эти движки лучше летают на 4s аккумах чем на 3s… но на то время я этого не знал (инструкцию же в детстве читать не научили) и поэтому: интернет, форумы.
Хм. Прошивка регулей… Ага, надо попробовать что это такое… Прошивка SimonK, ага… говорят круто, стабильно — пробуем. Не буду описывать режим прошивки, т. к. это тот еще геморрой, когда нет подходящих коннекторов. Итог был потрясающим! Вау! Стабильно висит в воздухе! Держит высоту! Камеру таскает! Но итог был потрясающим – итог был недолгим. Проба первого Failsafe. Возврат домой — ну… вернулся… с дрейфом (gps, видимо, был немного повернут), но вернулся. Хорошо.
Потом еще и назу прошил! Ведь прошивка вышла… как ее обойти. Говорят же еще лучше будет. И одним прекрасным днем….поехали полетать в поле.
«Отлети подальше» – говорили они, «все будет ништяк» – убеждали они. В конечном счете краш. Причем такой… нормальный. Карбоновый подвес в щепки (хорошо что камеру снял). Пару лучей под замену и пару пропов тоже. Шок! Почему! Из-за чего! Грешил на назу. Откат назы до заводской прошивки не помог.
На failsafe он все падал и падал. Но без него вроде летал. Конечно же, хотелось и поснимать что-то. Даже умудрился снять первый «шоурил» так сказать. И в итоге в один прекрасный день мы встали рано утром (чтоб не было людей в городе почти) и пошли поснимать городской мост. Во время запуска пару раз «проскакивали моторы», т. е. дергались и не раскручивались. Но что уж нам… зря пришли что ли? Все таки запустили его в воздух и даже что-то поснимали. Когда аккумы уже сели и я собирался снижаться и уезжать домой, на высоте около 10 метров над набережной около моста, гексакоптер решил что хочет быть квадрокоптером и просто-напросто отрубил 2 движка. Элегантно наклонясь на 90 градусов он принял курс на землю, точнее, на асфальт. Представляете вот эту картину в замедленной съемке? Летит коптер в землю, а у тебя в голове счетчик такой тикает: -20$… -50$… – 100$…
И тут, откуда ни возьмись, из-под моста еще и люди выходят. У меня волосы на голове поседели, выпали, отрасли и снова поседели. Только чудом он упал метрах в двух от них. С того момента вопрос о безопасности полетов для меня на первом месте и над людьми, вообще, стараюсь не летать. Немного отойдя от увиденного я оценил масштаб урона.

Даже микро SD-флешка сломалась пополам. :)

Видео не осталось на память… Какие тут съемки, когда уверенности в коптере нет? И тут я наткнулся на статью, что якобы прошивка SimonK не работает с «многополюсными» двигателями (вроде так называется).
«Етижи пассатижи» — снова подумал я. Новое скрежетание по сусекам и покупка новых регуляторов. Купил регуляторы turnigy plush 30a*. Поставил. Ого! Летает… Что-то мне еще страшно летать… Но все таки оно работало в нормальном режиме, и даже failsafe, будь он неладен. К этому времени я перешел на 4s аккумы (как надо было сделать вначале). И в момент моего счастья один человек все испортил. Он сказал что такой сетап опасный. Он может упасть завтра, через месяц, через год. Типо эти регули с такими движками не подружаться. Какие проблемы, денег-то уйма… купил двигатели T-motor 2814-10 770kvу знакомого. Так как у него с такими же регулями и винтами коптер летал, но на более длинной раме.

Все собранно и настроено. Но вот незадача, раскачивает коптер и все тут. Гейнами зажать до конца не получается. К тому времени я собирал уже свой самодельный подвес на БК моторах. (О нем расскажу в другой статье). Повесил подвес. Вес стал больше и эффект смещения центра тяжести в них сработал. Коптер стал летать нормально. Единственным минусом были полеты в ветер. Тогда его все-таки раскачивало и я нервничал. Но летал он довольно неплохо и довольно долго. Было снято несколько проектов и т. д.

После сборки квадрика на комплекте E300 от DJIя подумал о том, что хватит самодельничать, пора и гексу обновить, и купил комплект DJIe800*. Так же эта покупка предполагала переход с 4s на 6s аккумы. Посмотрев на инспайра и аналогов, понял, что на 6sдействительно будут «долгие» полеты. Такой же комплект стоит на DJIinspire 1. Получается практически шестимоторный инспайр). В таком сетапе он летает и по сей день. Коптер стал действительно стабильней, маневренней, и как ни странно тише. :)
Быстросъемные пропеллеры — это вообще потрясающе. Очень устал от этих закручиваний и откручиваний гаечек, ведь транспортировать со снятыми пропеллерами куда удобнее.

Единственное пришлось слегка удлинить раму. Дело в том, что этот комплект подразумевает 13-ые винты взамен моих 12-ых. И со стоковыми мотормаунтами они бы друг друга цепляли. Но покупать новую раму было б сильно затратно, поэтому просто решил поставить мотормаунты современных версий этой рамы. Купил на «хоббикинге» (вот такие) мотормаунты, которые крепятся с торца трубы, тем самым удлиняя ее примерно на 7-9 см. В итоге зазор между пропеллерами стал примерно 1,5-2 см. Сейчас коптер таскает 3х осевой подвес + sonynex 5n. На самом деле с его грузоподъемностью он спокойно вытянет и зеркалку, так как рекомендуемая нагрузка на луч 800 грамм, а максимальная 2000 граммм, просто я не считаю, что мне это сейчас надо.
Вот такая получилась история о коптеростроении с нуля. Сказать что постройка вышла дешевле чем можно было купить коптер? Конечно нет. Однако, полученный опыт стоит этих денег и времени. Да и еще к вопросу о покупке аккумуляторов. Никогда не покупайте эти желтые zippycompact! Неважно 3s или 4s — это хлам. К сравнению гекса, с t-motor 2014-10 и подвесом на них, летала 5 минут. Реально всего 5 минут! На паре аккумов в сумме 10000mah. Если и выбирать из «дешевых» аккумов, то либо простые zippyлибо turnigy. Кроме того, существенную роль играет токоотдача. На 40с коптер пролетает от 4 до 6 минут дольше чем на 25с (личный опыт).
Вывод:
1) Собрать коптер с нулевыми знаниями можно, но будьте готовы потратить на это время и деньги. Короче говоря, сначала вы приобретете знания, а потом коптер.
2) Это будет дешевле? Скорее всего нет.
3) Вы сможете гордо говорить «я сам его собрал» (из комплектующих).
4) Возможно на вопрос «сколько стоит?» вы будете отвечать «даже не знаю».
5) Приобретенный опыт поможет вам починить свой коптер в открытом поле с помощью молотка и зубила.
6) При постройке коптера вы научитесь паять, много паять, хорошо паять и в совершенстве овладеете исконно русскими ругательными фразооборотами.
На этом все. В следующей статье я продолжу тему «русских амбиций» и расскажу про строительство 3-х осевого подвеса, который сейчас установлен на этом коптере. Всем спасибо за внимание. :)
Ученые научили дроны облетать препятствия на высоких скоростях

Новый алгоритм может позволить быстрым и маневренным дронам выполнять срочные операции, такие как, например, поиск и спасение.
Аэрокосмические инженеры Массачусетского технологического института разработали алгоритм, который помогает дронам находить самый быстрый маршрут вокруг препятствий без сбоев. Новый алгоритм объединяет моделирование полета дрона через виртуальную полосу препятствий с данными экспериментов реального дрона, пролетающего по тому же маршруту в физическом пространстве.
Исследователи обнаружили, что дрон, обученный по их алгоритму, пролетел через простую полосу препятствий на 20% быстрее, чем дрон, обученный по обычным алгоритмам планирования. Интересно, что новый алгоритм не всегда позволял дронам опережать конкурентов на протяжении всего курса. В некоторых случаях он предпочел замедлить дрон, чтобы пройти сложный поворот, или сэкономить энергию, чтобы ускориться и в конечном итоге обогнать своего соперника.
«На высоких скоростях возникает сложная аэродинамика, которую трудно смоделировать, поэтому мы используем эксперименты в реальном мире, чтобы заполнить эти черные дыры, чтобы найти, например, что лучше сначала замедлить, а потом ускорить полет», - говорит Эзра Тал, аспирант факультета аэронавтики и астронавтики Массачусетского технологического института. «Именно этот целостный подход мы используем, чтобы увидеть, как мы можем сделать траекторию в целом как можно быстрее».
«Такие алгоритмы являются очень ценным шагом на пути к созданию дронов будущего, которые могут очень быстро перемещаться в сложных условиях», - добавляет Сертак Караман, доцент кафедры аэронавтики и космонавтики и директор Лаборатории информационных систем и систем принятия решений Массачусетского технологического института. «Мы действительно надеемся раздвинуть границы, чтобы они могли летать настолько быстро, насколько это позволяют их физические возможности».
Обучить дронов обходить препятствия относительно просто, если они должны летать медленно. Это потому, что аэродинамика, такая как сопротивление, обычно не играет роли на низких скоростях, и их можно не учитывать при моделировании поведения дрона. Но на высоких скоростях такие эффекты гораздо более выражены, и гораздо сложнее предсказать, как будут управляться автомобили.
Поэтому исследователи планируют проводить больше экспериментов на более высоких скоростях и в более сложных условиях, чтобы еще больше улучшить свой алгоритм. Они также могут включать полетные данные пилотов-людей, которые дистанционно управляют дронами, и чьи решения и маневры могут помочь сосредоточиться на еще более быстрых, но все же выполнимых планах полета, пишет EurekAlert.
«Если пилот-человек замедляется или набирает скорость, это может повлиять на то, что делает наш алгоритм», - говорит Тал. «Мы также можем использовать траекторию человека-пилота в качестве отправной точки и улучшать ее, чтобы увидеть, что люди не делают, что наш алгоритм может вычислить, чтобы летать быстрее. Это некоторые идеи на будущее, о которых мы думаем».
Самый быстрый квадрокоптер в мире: мировой рекорд скорости

Несмотря на то, что наблюдателю с земли полет квадрокоптера порой может показаться невероятно быстрым, обычно предел скорости у таких дронов — всего порядка 130 км/ч. Drone Racing League модифицировала коптер и установила новый мировой рекорд, разогнав аппарат до феноменальных 263 км/ч!
Чтобы гарантировать, что победу в состязании принесет мастерство, а не количество финансирования той или иной команды, каждому участнику была выдана одна и та же модель квадрокоптера, спроектированный инженерами проекта. В результате, фаворитом оказался DRL RacerX — невероятно легкий (всего 800 граммов), но очень мобильный дрон. Он использует пару батарей емкостью 1300 мАч, которые питают 4 электродвижка, каждый из которых может достигать 46 000 об/мин.

Максимальная скорость беспилотника составляет 289,04 км/ч, однако по условиям состязания для достижения мирового рекорда дрон должен был не просто разогнаться, но и пролететь взад-вперед трассу длиной в 100 метров, при этом максимальная скорость во время обоих пролетов усредняется. Итоговым результатом и стала заветная цифра в 263 км/ч.
На сегодняшний день это не только официально самый быстрый квадрокоптер (предыдущий рекорд скорости составлял 201 км/ч); RacerX побил даже неофициальный Youtube-рекорд, когда беспилотник разогнался до 233 км/ч. Это означает, что на практике коптер запросто обгонит на трассе и Ford Mustang, и Chevrolet Camaros. Что касается участия в официальных состязаниях дронов, то для этого пилотам сверхскоростного квадрокоптера определенно надо обладать рефлексами джедаев.
Как выбрать или собрать своими руками гоночный квадрокоптер?
Дрон можно собрать самому, а можно приобрести комплект для сборки. Гоночный квадрокоптер появился на стыке разных категорий. Он может быть сравнительно небольшим, обладать камерой и поддерживать FPV управление, оснащаться мощными моторами и интеллектуальными режимами полета. Вместо готовой модели пилот может приобрести комплект для самостоятельной сборки или даже сам выбрать и купить отдельные комплектующие. Существуют и довольно крупные беспилотники для гонок, доступные в RTF комплектах.
Как выбрать гоночный квадрокоптер
Выбирая гоночный дрон, необходимо учесть несколько вещей. Во-первых, следует принять как данность тот факт, что большинство коптеров продаются в виде комплектов. Обычно есть рама, электронная начинка, моторы и пропеллеры, но нет пульта управления, нет аккумулятора, камеры, FPV передатчика, очков. RTF коптеры (то есть собранные модели) тоже встречаются в продаже, но их не так много как, например, обычных квадрокоптеров с камерами.

Спортивный квадрокоптер должен быть прочным, так как он почти наверняка будет врезаться на высокой скорости, падать на землю, неудачно приземляться. Отсюда особенные требования к материалам рамы и корпуса. Карбоновая рама обеспечит необходимую прочность, но есть варианты из пластмассы, стекловолокна. Рекомендуем обращать внимание именно на карбон, как наиболее прочный. Существуют рамы из алюминия и других металлов, но стоят они дороже и используются для классов 250 и выше.
Цена на хорошую RTF модель не может быть низкой. Это не означает, что гоночный коптер окажется очень дорогим, но за 100$ более-менее качественный летательный аппарат вы не получите. Бесколлекторные движки, FPV камера, хороший пульт, облегченная, но прочная рама – все это стоит денег.
Всегда обращайте внимание на стоимость запасных частей. Вряд ли вы быстро сломаете раму или корпус, но пропеллеры, а также, возможно, платы будут ломаться после особенно жестких падений. Скоростные квадрокоптеры порой не оставляют времени на исправление ошибок в пилотировании, поэтому первые запуски вряд ли окажутся гладкими.
Время полета обычно не превышает 10 минут. Это не самый плохой результат, ведь коптер максимально облегчен (обычно вес не превышает 400-500 грамм), и емкий аккумулятор будет негативно сказываться на скоростных характеристиках.
Мы не рекомендуем приобретать гоночный дрон в качестве первого беспилотника.
Классы
Одним из основных критериев выбора является размер рамы, или ее класс. Небольшие коптеры относятся к 180-му классу, тогда как более крупные строятся на раме 250 класса. Цифрой обозначается расстояние по диагонали между двигателями.

Для гонок могут использоваться и более крупные рамы, но, как правило, сборка ведется именно на 180-й или 250-й рамах. Они универсальны, позволяют установить разные по мощности модели бесколлекторных двигателей, под них есть полетные контроллеры, регуляторы скорости, аккумуляторы и платы питания.
180 класс
180 рама весьма популярна, так она позволяет собрать мультикоптер сравнительно небольшого размера, способный, тем не менее, развивать приличную скорость. Это минимальный класс, в котором может использоваться камера формата GoPro. Например, на раму 160 класса придется искать камеру поменьше.

Еще одно преимущество перед младшими классами заключается в возможности устанавливать мощные двигатели для 210 и даже для 250 рамы. Тоже самое касается аккумулятора.
Из недостатков можно выделить малый размер пропеллеров, что сказывается на грузоподъемности и скоростных характеристиках. Квадрики на раме 180 размера могут комплектоваться максимум 4-х дюймовыми винтами. Такой же размер пропеллеров подходит и для более легкого 160 класса, тогда как в 210 классе могут использоваться уже 5-ти дюймовые винты.
Сравнительно небольшой размер рамы может вызвать определенные сложности при компоновке и сборке. Следует довольно тщательно продумывать расположение всех элементов.
250 класс
250-й класс считается универсальным для сборки спортивного коптера. Более крупные размеры рамы позволяют без проблем компоновать всю электронику и устанавливать емкие аккумуляторы.

На раму без проблем ставятся 5-ти дюймовые пропеллеры, и с высокой вероятностью станут и винты размером 6 дюймов (необходимо смотреть спецификацию). Пропеллер более 7 дюймов не установится, но, откровенно говоря, такие крупные винты нужны только на больших коптерах.
Пилот получает все еще небольшой, но очень быстрый дрон, на который спокойно монтируется GoPro камера, подвес, GPS модуль и емкая батарея. При этом стоимость рам 250-го класса весьма доступна, а выбор комплектующих максимален.
В целом, выбор между 180-м и 250-м классом в известной степени определяется личными предпочтениями. Если хочется получить небольшой (но не «комнатный») коптер для гонок, значит используем 180-й класс. Если же нет желания при сборке путаться в проводах двигателей и ломать голову над выбором подходящего по размерам полетного контроллера, то обращаем внимание на 250-ю раму.
Топ 3 готовых RTF комплектов
Для пилотов, не желающих тратить время на сборку высокоскоростных моделей, подойдут готовые RTF решения.

Стоимость таких квадриков обычно оказывается выше по сравнению с собственноручно собранными аппаратами, но зато все летает и работает прямо из коробки.
В наш Топ вошли:
- Walkera Runner 250
- Eachine Falcon 250
- Eachine EB185 FPV
Walkera Runner 250
Как понятно из названия, речь идет о 250-м классе. Walkera Runner 250 стоит около 300$ и считается одним из лучших гоночных коптеров в своей ценовой категории.

- Размеры 225×205х92 мм
- Вес 570 г
- FPV камера 800 TVL
- Пульт управления DEVO 7
- Аккумулятор 2200 mAh
- Бесколлекторные двигатели
- Длительность полета до 13 минут
- Дальность сигнала до 1000 метров
- Полетный контроллер FCS-Runner 250GPS
- Диаметр винтов 140 мм
- LED подсветка и прожекторы
Хотя речь идет о заводской модели, выглядит она как типичный спортивный квадрокоптер. Никакого корпуса, вся начинка находится на виду. Коптер легко управляется, однако вряд ли его можно рекомендовать в качестве первого летательного аппарата. Дрон очень быстро набирает скорость, резко маневрирует, мгновенно снижается. Видео транслируется на экран пульта.
Eachine Falcon 250
За 150$ можно стать владельцем быстрого Eachine Falcon 250. Речь идет о базовой комплектации, но при желании на раму устанавливаются более мощные моторы, емкий аккумулятор, 6-ти дюймовые пропеллеры (в базе 5-ти дюймовые винты). Пульта в комплекте нет.

- Размеры 230×245х90 мм
- Вес 535 г
- FPV камера 700 TVL
- Аккумулятор 1500 mAh
- Бесколлекторные двигатели 2204
- Полетный контроллер CC3D
- Диаметр винтов 5 дюймов
- LED подсветка
Eachine Falcon 250 можно с некоторой натяжкой отнести к категории «собрал сам». Пользователю оставлены довольно широкие возможности по модернизации, но ее не обязательно проводить. Для полетов необходимо приобрести пульт управления.
Eachine EB185 FPV
Еще одна интересная модель от Eachine, но построенная на 180-й раме. Стоимость EB185 FPV составляет около 165$, и это небольшие деньги за качественный спортивный квадрокоптер.

- Размеры 185×155х55 мм
- Вес 351 г
- FPV камера 520 TVL HD
- Аккумулятор 1300 mAh
- Бесколлекторные двигатели B1806 KV2300
- Полетный контроллер Naza32 Rev6 10DOF
- Диаметр винтов 4 дюйма
- LED подсветка
В комплекте нет аппаратуры управления, чем отчасти объясняется невысокая стоимость EB185.
Как построить гоночный дрон своими руками
У пилота, решившего самостоятельно собрать квадрокоптер, есть выбор из двух вариантов. Он может покупать все компоненты по отдельности, подбирая движки, регуляторы скорости, полетный контроллер и так далее, либо приобрести готовый для сборки набор.

В первом случае дрон получит индивидуальный дизайн и индивидуальные характеристики, но сборка и настройка квадрокоптера может занять много времени. Во-втором, беспилотник будет соответствовать спецификации, его сборка скорее всего займет не очень много времени, но это будет не уникальный квадрик.
Какой вариант выбрать, зависит от пожеланий будущего владельца дрона и от его ценовых ожиданий. Готовые наборы стоят дороже и могут содержать компоненты, которые у пилота уже есть (например, пульт или раму). В обоих случаях придется паять, и без навыков работы с паяльником не обойтись.
Готовые наборы для сборки

Дефицита в готовых наборах нет, но, как уже было сказано, они стоят недешево и могут содержать ненужные компоненты. Важным преимуществом таких наборов является наличие подробной инструкции. Кроме того, пользователь может не переживать о совместимости элементов, ему не придется определять размеры от края до края и думать, как разместить все платы и моторы на раме.
Самостоятельный подбор и сборка

Никаких ограничений для самостоятельного подбора комплектующих нет. Есть характеристики рамы, от которых зависит набор подходящих элементов, но сам список очень широк. Можно использовать любые подходящие регуляторы оборотов в минуты, любые контроллеры, батареи и так далее.
Недостаток в том, что финальный результат зачастую оказывается не таким, как предполагалось. Нет и полной инструкции для сборки.
Топ самых быстрых дронов в мире
Лучшими в классе традиционно считаются самые быстрые коптеры. Топ выглядит следующим образом:
- Walkera Furious 320 (120 км/ч)
- Teal Sport Racer (136 км/ч)
- Varavon Pathfinder (200 км/ч)
- VX1 (245 км/ч)
- DRL RacerX (263 км/ч)
Для управления столь быстрыми коптерами обычно используются шлемы или очки.
Надеемся, мы помогли понять, как выбрать спортивный квадрокоптер. Из перечисленных выше любительских RTF моделей сложно выбрать лучший вариант, но хорошими являются все.
На этом пока все, подписывайтесь на наши обзорные статьи и делитесь полезными материалами в социальных сетях. До новых встреч.
Какой быстрый дрон
Скорость пилота вингсьюта может достигать 200 км/ч и более.
Найдены возможные дубликаты
самый сок на 1:45

Самый сок мы вряд ли увидим, если это с героем видео уже не произошло.

Уже произошло. И, если я правильно помню, на этом же "игольном ушке".
Уточнил. Нет, не там.
тот который в видео в этой ветке - разбился в 2016м
камера может пережить ;)
обычно родственники такое не выкладывают
бывает как предостережение другим
Одному мне показалось, что на парашюте спускалась школьница в форменном сарафанчике эпохи СССР
Пилот вингсюта. От водителя кроссовок и операторши норковой шубки? Что у некоторых творится с мозгами?
Если кому-то действительно интересно, почему так, могу предположить, что операторше норковой шубки, как и водителю кроссовок нужны куда более скромные навыки, чем пилоту вингсьюта, поэтому их должности обычно не упоминают.
Тогда надо новые должности открывать - пилот парашюта, водитель параплана, навигационный штурман дельтаплана. Чем эти тряпколёты хуже тех.
Так есть же, парашютист, парапланерист и так далее. Не припомню аналогов для кроссовок и шуб. Специально полез в гугл, чтобы найти похожее слово для этих летунов. Нашел - "вингсьютер".
Ну от, это другое дело, а то всё пилоты да пилотки тряпок.
Удивительно, но их называют именно так. Живите с этим как хотите.
а на покрывале от дивана так можно?
Я боюсь, что такой прыжок не оставит шансов ни одному органу.
Ответ на пост «Успеет ли за вами ваш ангел-хранитель?»
Нашёл более подробную информацию по этому происшествию.
Инцидент произошел в 2014 году, в Далласе, штат Техас, США.
Действующие лица: Бэн - парашютист которого вырубили, Энди - инструктор, который открыл его запаску. Еще 2 скайдайвера, один из которых вырубил Бена.
Я не силен в терминологии, поэтому не знаю как правильно перевести выполняемое упражнение, но вроде как отрабатывалось погружение вниз головой. План прыжка отрабатывали на земле, но все были уставшие, это был 10 прыжок за день.
Во время падения один из участников улетел слишком далеко и в момент возвращения обратно к группе он развил слишком большую скорость, при этом был зациклен на инструкторе и не видел других парашютистов. Перед столкновением он успел перевернуться на спину и принять позу эмбриона. Удар произошел бедром в голову Бена (он тоже смотрел на инструктора и до самого столкновения не видел опасности).
Решение открыть запаску Бена на высоте в 5000 футов (примерно 1500 метров), а не дожидаться срабатывания прибора, Энди принял что бы был запас высоты (и как следствие времени) на то, чтобы Бен пришел в сознание.
В итоге Бэн пришел в сознание, нашел дропзону, выполнил практически идеальную студенческую коробочку при заходе на посадку, но у него не хватило сил сделать подушку и приземление было тоже болезненным (бедолага, как будто удара в голову ему было мало).
Ниже видео с камеры другого участника прыжка:
Ссылка на оригинальный пост Бена:

Успеет ли за вами ваш ангел-хранитель?
Экстрим и красота
Примерно так чувствует себя человек паук
Обделаться можно от одного лишь просмотра

Пролетел как лист фанеры
Летят утки
Бабуля в 102 года спрыгнула с парашютом.

Прыжок в никуда
Головокружительная съемка аттракциона с дрона в Китае
Как я прыгал с парашютом
Впервые прыгнуть с парашютом мне предложили еще в институте. Я стоял в очереди к военкому в институте, а мимо нас ходила девушка, и предлагала бесплатно прыгнуть с парашютом. Ходила, уговаривала, но ни кто не откликнулся. Я тоже промолчал. Вроде интересно, хочется, а боязно.
Второй раз идея пришла уже мне, когда я начал встречаться с будущей женой, и мы выбирала чем-бы заняться. Но была забракована.
Третий раз случился через много лет, когда сотрудник на работе загорелся прыжками с парашютом, и постоянно рассказывал как ему это нравится. В очередной свой рассказ, он мне и предложил - "Давай, вместе поедем прыгать". Я вспомнил свои старые желания, поросшие мхом, и. согласился. Жена, правда, когда узнала потребовала, чтобы я обязательно написал завещание - вдруг что случится))
В выходные мы приехали на аэродром. Я думал, что приедем, бац-бац, и сразу полетим. Ан-нет. Нам долго рассказывали что и как надо делать. Даже потренировались правильно приземляться, прыгая с метровой высоты))
И в конце мужик просто сказал - "Вы, конечно, все забудете, когда окажитесь в воздухе. Поэтому запомните три простые вещи - считайте до 503, поворачивайтесь по ветру, и сводите ноги вместе при приземлении". Он оказался прав - больше я ничего и не запомнил из его наставления, кроме этой фразы.
Дальше сходили к врачу - "Здоров? - Здоров! - Свободен".
Выдали нам парашюты - основной и запасной. Одели мы их. Застежек оказалось там очень много. И погрузились в самолет (две продольные лавки вдоль всего самолета). Что интересно погрузка происходила по весу. Т.е. сначала заходили самые легкие, а в конце самые тяжелые. Потому как выпрыгивать надо было с хвоста самолета, то тяжелые выпрыгнут первые. А если бы тяжелые прыгали последними, то теоретически могли бы успеть после прыжка долететь до легких.

Товарища моего посадили самым последним, а рядом с ним сел предпоследним.
"Проем" сзади самолета вообще не закрывался. И там стоял инструктор. Но лететь было страшновато. Представьте ехать в маршрутке с открытой дверью, а тут самолет))
Но самое страшное началось, когда мы взлетели. Нос самолета приподнялся, и мы начали съезжать вниз. А вниз был проем в самолете. И если выпадешь, то никакой парашют не поможет - расстояние до земли крошечное. А держаться реально не за что. А мы с другом, напомню, сидим ближе всех к краю пропасти. Начали судорожно хвататься за все подряд, чтобы остановить движение вниз. И тут слышим крик инструктора - "не трогай. ". Оказалось, что друг в попытках удержания себя в самолете, ухватился за кольцо парашюта, и начал его выдергивать не выходя из самолета)) Реально пронесло. Кое-как удержались в самолете. Затем набор высоты прекратился, и проблема с возможным выпадением наших тушек из самолета исчезла. А дальше начался конвейер. Люди с соседней лавки по очереди подходили к краю пропасти, и прыгали вниз. Когда соседняя лавка опустела, нам сказали пересесть на нее. Я замешкался, и остался стоять, когда все уже сидели. А сесть стало некуда. Места не было. Стоять в самолете было как-то страшновато, потряхивало. Но после рыка инструктора, все уплотнились, и мне удалось присесть. К этому времени самолет лег на нужный курс, и мой друг уже выпрыгнул. Следующим был я. Но, я забыл всунуть руку в специальное место на груди, чтобы можно было дернуть кольцо. А если руку туда не сунешь, то, думаю, врядли можно будет превозмочь силу ветра, и поднять руку, чтобы дернуть кольцо. Пришлось все это делать стоя около распахнутого зева самолета под крики инструктора "Давай прыгая! Что ты копаешься?!". Когда наконец рука заняла свое место, я сразу прыгнул вниз, боясь, что инструктор просто выкинет меня сам. Так, что насладиться видом земли с высоты низко-летящего самолета, и набраться страха не получилось))
А дальше все было на автомате.
Прыжок. Сильный ветер хочет сделать мне пластическую операцию, добавив кучу морщин.
Кричу во все горло 501-502-503-Купол, и дергаю за кольцо с надеждой. Пока ждал реакции от парашюта успел подумать, что все мои проблемы ерунда по сравнению с тем - откроется сейчас купол или нет. Открылся! Подергал за стропы, чтобы оказаться спиной к ветру для безопасного приземления. И начал любоваться окрестностями. Мне не понравилось. Вид - точь-в-точь как на Яндекс.картах. Скорость полета относительно низкая. Поэтому пейзаж меняется очень медленно. Скукота. Дальше было приземление. Меня напугали, что если расставить ноги, то их легко можно сломать. Поэтому свел ноги посильнее. Удар, перекат. И я на земле. Все закончилось. Встал. И тут я совершаю большую ошибку. Нам говорили, что надо помахать, что с тобой все в порядке. Ну, я и помахал вместо того, чтобы сначала свернуть парашют. И сильно поплатился за это. Подул ветерок, и мой парашют полетел. Но теперь уже не вниз, а вдоль земли. А т.к. я его от себя не отцеплял, то я покатился по земли на привязи, как пленник за конем в эпоху татаро-монгольского ига. Сначала я попытался потянуть за одну из строп, чтобы убрать получившийся парус. Но безуспешно - ветер был явно сильнее меня. Только руки ободрал. Тогда пришлось расстегивать застежки, которых было реально много - штук шесть точно было. И расстегнуть их было очень сложно. Попробуй расстегнуть карабин, когда тебя волочат по земле на большой скорости. По ощущениям за
100м аттракциона я успел расстегнуть только три застежки. Но тут мне пришли на помощь - по аэродрому ездили машина на случай экстренной помощи. И парашют обволок машину. Парус исчез, и я наконец остановился. Приключение закончилось. И могу сказать, что экстрим от катания по земли был намного выше, чем собственно сам прыжок с парашютом.
Вот так прошел мой первый прыжок с парашютом.
Наверное и последний тоже. Больше не тянет))
PS Нас снимали фотографы, но на таком расстоянии лица не различишь. Поэтому будем считать, что на этой фотографии я.
Самый быстрый квадрокоптер в мире: мировой рекорд скорости
Несмотря на то, что наблюдателю с земли полет квадрокоптера порой может показаться невероятно быстрым, обычно предел скорости у таких дронов — всего порядка 130 км/ч. Drone Racing League модифицировала коптер и установила новый мировой рекорд, разогнав аппарат до феноменальных 263 км/ч!
Чтобы гарантировать, что победу в состязании принесет мастерство, а не количество финансирования той или иной команды, каждому участнику была выдана одна и та же модель квадрокоптера, спроектированный инженерами проекта. В результате, фаворитом оказался DRL RacerX — невероятно легкий (всего 800 граммов), но очень мобильный дрон. Он использует пару батарей емкостью 1300 мАч, которые питают 4 электродвижка, каждый из которых может достигать 46 000 об/мин.
Максимальная скорость беспилотника составляет 289,04 км/ч, однако по условиям состязания для достижения мирового рекорда дрон должен был не просто разогнаться, но и пролететь взад-вперед трассу длиной в 100 метров, при этом максимальная скорость во время обоих пролетов усредняется. Итоговым результатом и стала заветная цифра в 263 км/ч.
На сегодняшний день это не только официально самый быстрый квадрокоптер (предыдущий рекорд скорости составлял 201 км/ч); RacerX побил даже неофициальный Youtube-рекорд, когда беспилотник разогнался до 233 км/ч. Это означает, что на практике коптер запросто обгонит на трассе и Ford Mustang, и Chevrolet Camaros. Что касается участия в официальных состязаниях дронов, то для этого пилотам сверхскоростного квадрокоптера определенно надо обладать рефлексами джедаев.
Пять способов увеличить мощность квадрокоптера
Мощный квадрокоптер помогает летать долго и без проблем. Часто недостаточно просто перейти на модель подороже. Сегодня мы разберем пять вещей, которые можно сделать с коптером, чтобы повысить его мощность.
Замена пропеллеров

Винты классифицируются по шагу и длине. Расстояние, преодолеваемое дроном за один оборот винта называется тангажом.
Пропеллер с большим шагом перемещает дрон на бОльшее расстояние за один оборот, но уровень турбулентности повышается. Из-за этого дрон может трястись. Также такие пропеллеры производят меньший крутящий момент — аккумулятор быстрее разряжается.
Длинные винты создают большую подъемную силу, более стабильны при зависании, чем короткие пропеллеры. У них больше мощности для подъема тяжелых грузов, но аккумулятор разряжается быстрее.
Увеличение эффективности пропеллеров:
Цель полета
Длина пропеллеров
Шаг пропеллеров
Продолжительное время полета
Обновление аккумулятора
Обновление аккумулятора – еще один способ повысить мощность квадрокоптера. Батарея большой емкости улучшит возможности дрона и поможет достичь идеального баланса между производительностью и временем полета.
Аккумулятор дрона обеспечивает питание двигателей, которые приводят в движение винты. Следовательно, мощность дрона зависит от доступного количества энергии его батареи. Большая емкость аккумулятора обеспечит большую стабильность.
Литиевые батареи – самые распространенный тип аккумуляторов квадрокоптеров. Они подразделяются на два типа:
- литий-полимерные (LiPO);
- литиевые высоковольтные (LiHV).
Разница между ними в том, что литиево-полимерные батареи имеют напряжение 4,2 по сравнению с литиевыми высоковольтными (предельное напряжение зарядки 4,35).
Квадрокоптер с заряженным аккумулятором LiHV может развивать бОльшую мощность, но напряжение при разрядке довольно быстро падает. У LiPO более линейный разряд, поэтому можно быстро измерить оставшееся время полета.
Соблюдение правил ухода за аккумулятором.
Можно улучшить состояние батарей квадрокоптера, соблюдая несколько простых правил:
- Не заряжать аккумулятор, пока он горячий. Очевидно, после полета, дрон будет нуждаться в подзарядке, но лучше подождать, пока аккумулятор остынет. Иначе могут возникнуть нежелательные химические реакции, влияющие на износ батареи.
- Не разряжать аккумулятор полностью. Лучше приземлять дрон до того, как на контроллере появится предупреждение о низком заряде батареи. Несколько дополнительных минут полета не стоят ухудшения аккумулятора.
- Не перезаряжать аккумулятор. Да, современные батареи имеют возможность прекращать зарядку при достижении максимального напряжения, но все же рекомендуется самостоятельно отключать дрон от источника питания. Некоторые аккумуляторы могут продолжать заряжаться, даже когда достигают 100% заряда, поэтому быстро выходят из строя. Поврежденная батарея дрона со временем приведет к уменьшению времени полета.
Удалите лишний вес.

Снимайте с корпуса аксессуары, которые вам не нужны. К примеру: защита пропеллеров, фильтры объектива, и даже камера, если съемка не требуется в полёте. Любой дополнительный вес приводит к более высокому потреблению энергии, уменьшает общее время полета, снижает маневренность.
Установка более мощных двигателей.
Если вы пошли по пути «сделай сам» и решили самостоятельно собрать дрон, можно обновить двигатели. Лучше всего выбирать с большей тягой. Соотношение тяги к весу мотора вашего дрона должно позволять дрону стабильно держаться в воздухе.
Итак, соблюдая эти простые правила, можно добиться более стабильного полета квадрокоптера, увеличить время нахождения в воздухе или сделать дрон более мощным.
Признак мастерства. В России придумали метод стабилизации дронов в воздухе

Беспилотные летательные аппараты с каждым годом выполняют все больше военных задач: от нанесения ударов с воздуха до разведки. Беспилотники могут выполнять задания, опасные для экипажа управляемых летательных аппаратов: проводить работы в горячих точках или даже служить «камикадзе», то есть разбивать противника ценой своего существования.
Однако есть важная задача — обеспечить стабильность полёта беспилотного аппарата в сложных или быстро меняющихся обстоятельствах. Зачастую военные дроны летают в сложных климатических условиях. В Сирии БПЛА может попасть в песчаную бурю, в Арктике на него может обрушиться снегопад. Порой в дроны попадают пули и осколки снарядов: даже если это не выводит беспилотник из строя, такой удар способен сбить его с курса.
Решением этой задачи занимаются в Московском авиационном институте. Там работают над программно-аппаратным комплексом быстрой стабилизации беспилотника при негативном воздействии окружающей среды. Ключевое слово здесь «быстрой», ведь время стабилизации аппарата, по оценке коллектива, составит всего 5-7 секунд, что примерно в 10 раз быстрее, чем при использовании систем, имеющихся на рынке сегодня.

Принцип работы комплекса основан на том, что карта движения беспилотника сегментируется на небольшие участки, что помогает избавиться от зависимости ориентиров друг от друга и значительно сократить время оценки состояния системы.
Беспилотный летательный аппарат с системой быстрой стабилизации можно будет использовать не только в военных целях, но и в гражданских. Например, в спасательных операциях МЧС, в горном деле, сельском хозяйстве, борьбе с браконьерством, экологическом мониторинге и мониторинге инфраструктурного оборудования, установленного в труднодоступной и малонаселенной местности.
Представить готовый прототип беспилотника с уникальной системой стабилизации планируется в 2023 году.
Как не угробить дрон при первом же полете. Новичкам на заметку

Держи 10 советов, которые помогут новичкам быстрее освоить полеты и уберегут от глупых, но дорогих ошибок. Советы общие, и полезны всем владельцам дронов.
Прежде чем поднимать дрон в воздух, прочти инструкцию. Там подробно расписаны правила обращения с дроном, описание составляющих — мол, это рычажок, это пропеллер, это батарея.
Изучи их, прежде чем совершить свой первый полет.
Смотри полезные ролики на YouTube:
А здесь полноценные видеообзоры дронов DJI от ребят из «М.Видео». Узнаете, что они из себя представляют и какой лучше выбрать.
Многие дроны, вроде DJI или Xiaomi, имеют собственное приложения для iOS и Android. В инструкции найдешь ссылку на него.
Дронами DJI можно управлять и без приложения и смартфона — только пультом. Но с приложением это будет сделать проще. Оно предоставляет дополнительные фишки управления, выводит на экран важную информацию о полете и ошибки.

Купи заранее комплект защиты, дополнительные батареи и запасные лопасти. Защита убережет лопасти от поломки, если при полёте заденешь дерево или стену. Но дополнительные всегда стоит иметь при себе, минимум два комплекта.
Дроны летают не очень долго, поэтому батареи — самый ценный ресурс. Подготовь сразу несколько заряженных аккумуляторов, чтобы менять их в поле и увеличить время полета.
Для первого полета лучше выбрать открытую площадку где-нибудь за городом: без деревьев и водоемов. Лучше в поле, где трава смягчит падение.
НЕ СТОИТ взлетать с железобетонных конструкций и вблизи крупных металлических объектов.
От этого компас сбивается, и поведение дрона в воздухе становится непредсказуемым.
Избегай полетов над скоплением людей — на концертах, спортивных мероприятиях, фестивалях. Если потеряешь управление, дрон может упасть и нанести серьезные травмы прохожим вращающимися лопастями.
Совет от эксперта М.Видео: прежде чем взлетать, откалибруй компас на дроне и дай ему пару минут поймать спутники. Количество пойманных спутников отобразится в приложении.
С их помощью дрон ориентируется в пространстве и может вернуться на место взлета. Например, когда уровень заряда упадет до критического уровня, он вернется к точке взлета.
Кроме того, они позволяют ему неподвижно зависать на определенной высоте, чтобы ты мог сделать классный кадр.

Заведи двигатели и проверь состояние винтов. Звук должен быть ровный, без посторонних шумов. Перед каждым взлетом проверяй, правильно ли закрепил их. Это поможет избежать несчастных случаев.
На всех пропеллерах DJI есть пиктограмма, показывающая, в какую сторону его нужно повернуть до щелчка, чтобы закрепить. Пропеллеры нельзя перепутать местами — они просто не защелкнутся, если пытаешься установить не на свое место.
Также помни, что винты не одинаковые, а парные. Первый и четвертый, как второй и третий — между собой одинаковы.
Нижняя часть всех винтов смотрит в сторону батареи.
Квадрокоптеры DJI имеют полезные фишки, которые сильно упрощают его управление.
Режим для новичков — ограничивает максимальную скорость, высоту и дальность полета от точки взлета. Например, в режиме TapFly укажи на экране точку, и дрон плавно полетит в этом направлении. А ты сможешь сосредоточиться на фотографиях и видео.
Самый сложный режим — спорт: отключаются все предупреждающие датчики, дрон не огибает препятствия. Подойдет для летчиков со стажем.

Во время полета всегда следи за уровнем заряда батареи. Первое предупреждение появится при 30%. Когда заряд опустится до 15%, дрон сам начнётся снижаться.
Советую не доводить до критической отметки и садиться на 30-35%.
Настрой автоматический возврат к точке взлета, когда заряд аккумулятора опустится ниже 30%.
Аккумулятора DJI Mavic Pro хватает примерно на 24 минуты в безветренную погоду в поле, вдали от высоковольтных проводов и зданий. Если условия будут не такие идеальные, время полета сократится.

Гонять по двору кошек и маневрировать между деревьями лучше только в полном комплекте защиты. Иначе сломаешь лопасти или моторы.
И, кстати, деревья теперь — твой главный враг! А еще линии электропередачи, кусты, высокие здания и фонари.
Также не стоит совать пальцы в пропеллеры. Вроде банальный совет, но многие не воспринимают дроны всерьез и суют пальцы куда не надо. Будет как минимум больно, плюс повредишь лопасти.
Поначалу страшно задеть здание, деревья или провода. Из-за этого приходится очень высоко взлетать, что чаще всего не надо. Дрон получается слишком высоко от объекта съемки.
Чтобы избавиться от этого, перед взлетом осмотри место съемки.
Прикинь высоту зданий или других объектов вокруг.
Высота типовых жилых многоэтажек такая: 3-4 метра — первый этаж, 2,7-3 метра — каждый следующий. Плюс чердачное техническое помещение — 2,5-2,7 метра. Пролетая около самой высокой точки, обрати внимание на показания приборов и запомни эту высоту.
Также учись управлять дроном с учетом ветра. Его сила и направление могут меняться в зависимости от высоты полета.
Даже на высоте 10 метров тебя может ждать более сильный/слабый ветер. Поначалу будет сложно, новички теряют управление и дроны бьет о ближайшие дома и деревья.
Начинай с небольшой высоты, например, на уровне глаз, чтобы проще было его контролировать.

Если посадка получилась аварийной, не стоит как можно быстрее мчаться к дрону и разбираться, что произошло. Подожди, пока двигатели полностью остановятся, убедись, что он не дёрнется. После чего выключи пульт и аккуратно подними его за дно.
Затем отключи аккумуляторы, чтобы дрон не решил случайно продолжить полет прямо в руках. Можно даже накинуть на него какую-то ткань, например, собственную футболку.
Это защитит от случайно включившихся двигателей.
Вот такие простые, но нужные советы каждому начинающему пилоту. Практикуйся, и у тебя все получится.
Читайте также: