
Кинематическая схема мальтийского креста
Обновлено: 05.07.2024
МАЛЬТИЙСКИЙ КРЕСТ - МЕХАНИЗМ И ОРДЕНСКИЙ ЗНАК
В заметке "История кинотехники" ("Наука и жизнь" № 6, 2001 г.) упоминался механизм для осуществления прерывистого движения ленты - мальтийский крест. Как выглядел этот механизм и почему он получил такое странное название? Л. Ермакова (Москва).
Во многих технических устройствах возникает задача - преобразовать непрерывное вращение ведущего вала в периодические повороты с остановками вала ведомого. В кинопроекторах это необходимо для остановки кадра на пленке перед объективом, в различных станках-автоматах - для остановки детали или инструмента на время работы. Устройство, осуществляющее такое движение, получило название "мальтийский механизм" или "мальтийский крест".
Ведущее звено механизма - кривошип - имеет вид диска со стальным пальцем на крае и цилиндрическим выступом в центре. Выступ имеет полукруглую выемку напротив пальца. Ведомый элемент (он-то и называется "крестом") представляет собой пластину с несколькими (обычно от 3 до 12) прорезями. Стороны пластины очерчены дугами окружности того же радиуса, что и выступ кривошипа.
При вращении ведущего вала палец кривошипа входит в прорезь креста и, скользя в ней, поворачивает ведомый вал на 1/ n часть оборота ( n - число прорезей). Повернувшись, вал останавливается (от самопроизвольного проворачивания его предохраняет запирающее устройство). При следующем повороте кривошипа его палец входит в другую прорезь креста, и процесс повторяется. При равномерном вращении кривошипа отношение времени движения креста к времени его остановки равно ( n - 2)/( n + 2).
Более широкое применение нашел мальтийский механизм с внутренним зацеплением. Он компактнее и поворачивает крест более плавно. Кривошип может иметь несколько пальцев, а более сложная конструкция самого механизма позволяет передавать движение между валами, которые скрещиваются под углом до 90 градусов.
Название свое механизм получил по одному из названий духовно-рыцарского ордена иоаннитов или госпитальеров. Орден был основан в Палестине в начале XII века крестоносцами и имел резиденцию в иерусалимском госпитале Святого Иоанна (доме для паломников). В 1530 году иоанниты обосновались на острове Мальта и стали называться Мальтийским орденом. В декабре 1798 года Великим магистром ордена был избран русский император Павел I. Орден существует и поныне, его знаком служит четырехконечный крест с вогнутыми концами. Ведомый элемент механизма прерывистого движения с внешним зацеплением по форме очень напоминает его.
Мальтийский механизм
Во многих технических устройствах возникает задача — преобразовать непрерывное вращение ведущего вала в периодические повороты с остановками вала ведомого. В кинопроекторах это необходимо для остановки кадра на пленке перед объективом, в часах для перевода секундной стрелки, в различных станках-автоматах — для остановки детали или инструмента на время работы. Устройство, осуществляющее такое движение, получило название мальтийский механизм или мальтийский крест. Своеобразное имя механизм получил из-за сходства ведомой части механизма c мальтийским крестом ордена иоаннитов. Великим магистром этого ордена в 1798 году был избран русский император Павел I.

Различают мальтийские механизмы на два крупнейших подвида.
1. Мальтийский механизм с внешним зацеплением

2. Мальтийский механизм с внутренним зацеплением

Более широкое применение нашел мальтийский механизм с внутренним зацеплением. Он компактнее и поворачивает крест более плавно. Также механизмы могут отличаться количеством кривошипов или количеством пазов в кресте.
Периодическое движение ведомого звена обеспечивает палец, вращающийся на ведущем колесе (кривошипе), который входя в паз креста вращает его пока не выйдет из зацепления, совершив оборот на определенный угол (зависит от количества кривошипов) палец входит в следующий паз и вновь повторяет цикл. Для того чтобы ведомое звено не прокручивалась инерционно при внешнем зацеплении, делают стопорный сегмент, который имеет радиус равный радиусу наружных дуг креста. Количество пазов на кресте может быть от 3 до 12. При равномерном вращении кривошипа отношение времени движения креста к времени его остановки равно (n - 2)/(n + 2), где n - число прорезей.
Мальтийский механизм (крест)
Мальтийские кресты широко применяются в машинных автоматах. Они относятся к механизмам прерывистого действия и предназначены для преобразования равномерного вращения ведущего звена в периодические с остановками ведомого звена, работают плавно без ударов (в отличие от храповых механизмов).
Наиболее распространенные мальтийские механизмы с внешним зацеплением (рис. 1.17). Такой механизм состоит из ведущего кривошипа 7, ролика 2 на его конце, мальтийского креста 3. При вращении кривошипа 1 ролик 2 входит в паз 4 мальтийского креста 3 и возвращает его на заданный угол. После выхода ролика 2 из паза 4 угловое положение мальтийского креста фиксируется цилиндрической поверхностью диска.
Мальтийские механизмы проектируются с числом пазов мальтийского креста, равным 3 + 12. Расчеты храповых механизмов на прочность проводятся в зависимости от вращающего момента на вале храпового колеса.

Рис. 1.17. Мальтийский механизм: 1 — ведущий кривошип;
2 — ролик; 3 - мальтийский крест; 4 - паз мальтийского креста
Ответы на вопросы
1.1. Машина-орудие воспринимает энергию, которая затрачивается на преодоление внешних сил, непосредственно связанных с процессом производства, а машина-двигатель превращает энергию и передает ее через передаточный механизм (например, редуктор) машине-орудию. На рис. 1.2 передача — поз. 3—4—6.
1.2. На рис. 1.2 показана передача зацеплением, с гибкой связью и параллельными валами.
1.4. Рис. 1.18.
Рис. 1.18. Трехступенчатая передача
1.6. Если известна мощность Р и угловая скорость со, то вращающий
Подставив значения Pt и Р2 вформулу для определения КПД, получим
Если известны вращающие моменты, то передаточное число .
Глава 2
ФРИКЦИОННЫЕ ПЕРЕДАЧИ
Общие сведения
2.1. Фрикционная передача — механическая передача, служащая для передачи вращательного движения (или для преобразования вращательного движения в поступательное) между валами с помощью сил трения, возникающих между катками, цилиндрами или конусами, насаженными на валы и прижимаемыми один к другому.
Фрикционные передачи состоят из двух катков (рис. 2.1): ведущего 1 и ведомого 2, которые прижимаются один к другому силой Fr (на рисунке — пружиной), так что сила трения Ту в месте контакта катков достаточна для передаваемой окружной силы Ft.

Рис. 2.1. Цилиндрическая фрикционная передача:
1 — ведущий каток; 2 — ведомый каток
Условие работоспособности передачи:
Нарушение условия (2.1) приводит к буксованию. Один каток к другому может быть прижат:
• предварительно затянутыми пружинами (в передачах, предназначен
ных для работы при небольших нагрузках);
• гидроцилиндрами (при передаче больших нагрузок);
• собственной массой машины или узла;
• через систему рычагов с помощью перечисленных выше средств;
• центробежной силой (в случае сложного движения катков в планетарных системах).
Узлы и механизмы полиграфического оборудования. Зубчатые механизмы. Прочностные расчеты зубчатых передач , страница 25
Мальтийские механизмы (рис. 7.2) применяются в приборах для преобразования вращательного непрерывного движения в прерывистое, например, в механизме прерывистого движения карточных перфораторов и др.
Число лопастей креста 1 обычно не менее трех. Число ведущих пальцев 3 может быть два, три и более. Так как крест поворачивается на некоторый угол поворота оси О, то время его движения обозначим через tд, а время покоя – tп. Если угол φ будет больше π/2, то в момент вступления пальца в соприкосновение с крестом наблюдается жесткий удар. Если φ<π/2, то в конце хода будет наблюдаться некоторое обратное движение мальтийского креста. Мальтийский механизм, у которого прорези расположены симметрично и периоды движения (как и периоды покоя) между собой одинаковы, называется нормальным.
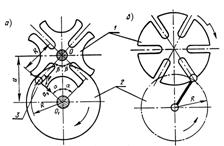
Рисунок 7.2.Схемы мальтийского механизма:
основные элементы мальтийского механизма (а), условное графическое обозначение механизма на кинематической схеме (б)
Рабочий угол поворота диска (пальца)
Очевидно, где z – число пазов мальтийского креста.
За время t диск 2 совершает один оборот, т.е. проходит угол 2π. Иногда время t называют циклом работы. За один цикл механизма крест повернется на угол 2β.
Время поворота креста на угол 2β.
За время t палец проходит угол 2π, время покоя креста tп соответствует углу 2π-2α. Тогда
Следовательно, чем больше z, тем меньше tп.
Число пазов z и число пальцев k как правило удовлетворяет условию
Если задано число оборотов пальца в минуту n, то из выражения (7.1) следует
Совместное рассмотрение выражений (7.2) и (7.3) дает продолжительность выстоя (покоя):
При расчете мальтийского механизма учитывают динамическое давление при входе пальца в паз:
,
где а – межцентровое расстояние;
J‑ приведенный к валу креста момент инерции масс, связанных с крестом;
ω‑ угловая скорость пальца.
Коэффициент полезного действия мальтийского механизма при опорах
скольжения ; качения - .
7.2 Кулачковые механизмы
7.2.1 Виды и применение
Кулачковые механизмы находят повсеместное применение во многих механизмах полиграфического оборудования. Предназначены для преобразования движения входного движения обычно вращающегося кулачка в заданный вид движения выходного звена (толкателя или коромысла).
Механизмы мальтийского креста
Механизмы мальтийского креста (рис. 6.12) являются, по существу, разновидностью кулисных механизмов (см. рис. 6.10, в). Роль кулисы выполняют по очереди пазы 1 мальтийского креста 2, а роль ползуна – цевка 4.

Рис. 6.12. Механизм мальтийского креста:
1 – паз; 2 – крест; 3 – кривошип; 4 – цевка
Непрерывно вращающийся кривошип 3 своей цевкой 4 входит в паз креста и поворачивает его на угол Dj = 2p/z, где z = 3…20 – число пазов креста. Затем цевка выходит из паза, и крест останавливается до момента входа цевки в следующий паз. После выхода цевки из паза крест оказывается «на свободе» и может самопроизвольно повернуться. Для предотвращения самопроизвольного поворота в механизм встраивается фиксатор. Обычно (но не всегда) фиксатор выполняется в виде неполного диска 5, входящего в дугообразные вырезы креста на время его "выстоя".
Таким образом, крест и приводимые им в движение детали совершают периодические (шаговые) повороты. Времена поворота и выстоя креста определяются скоростью вращения кривошипа и числом пазов креста. Движение креста, как кулисы, является неравномерным – с разгоном и торможением.
Передаточное отношение механизма мальтийского креста u ¹ const. Также и КПД механизма h ¹ const. Примерный вид графиков j = f1(a), = f2(a),, = f3(a), где j – угол поворота креста, a – угол поворота кривошипа, приведен на рис. 6.13.
Максимальная угловая скорость креста равна
, (6.22)
где w1 – скорость вращения кривошипа;
(см. рис. 6.12).
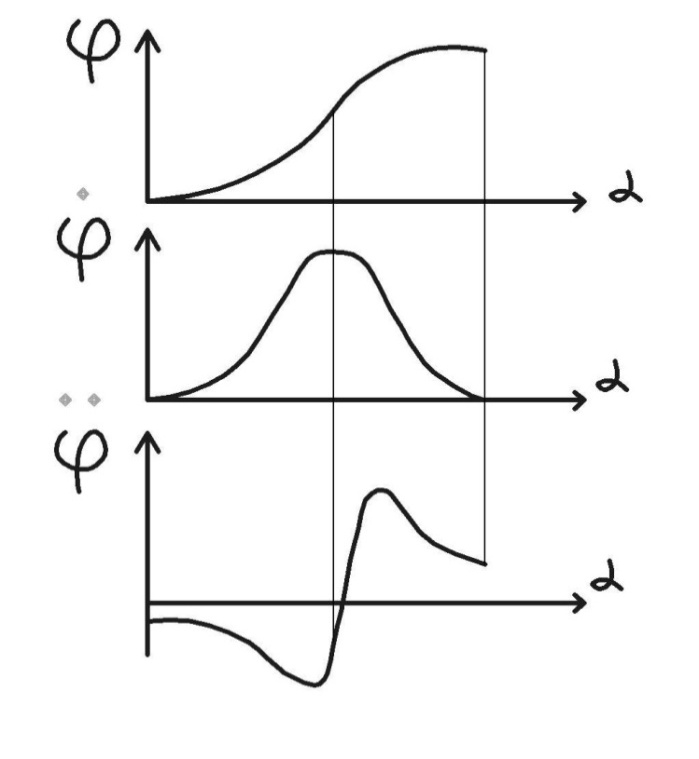
Рис. 6.13. Перемещение, скорость и ускорение мальтийского креста
Максимальное угловое ускорение креста

(6.23)

(6.24)
В начале и конце поворота креста имеют место скачки ускорения и, как следствие «мягкие» удары, вызывающие дополнительные динамические нагрузки в механизме.
Длины кривошипа R = O1A и стойки L = О1О2 связаны зависимостью R = Lsin(p/z). Истинные размеры звеньев механизма выбираются исходя из: соображений компоновки, нагрузок в звеньях и шарнирах механизма, жесткости и точности механизма и др.
Механизм мальтийского креста широко применяется в транспортирующих устройствах технологических машин и линий, обеспечивая шаговое перемещение с плавным разгоном и торможением. На рис. 6.14, а изображена схема привода цепного линейного транспортера, а на рис. 6.14, б – схема привода кругового транспортирующего устройства – карусели.

Рис. 6.14. Привод транспортирующего устройства:
а – линейного, б – кругового;
1 – цепной транспортер; 2 – мальтийский крест; 3 – кривошип; 4 – карусель;
5, 6 – зубчатая передача
Кривошип 3 мальтийского механизма закреплен на выходном валу редуктора P. Мальтийский крест в схеме а поворачивает звездочки цепного транспортера, а в схеме б поворачивает шестерню 6 зубчатой передачи. Передача позволяет изменить шаг поворота карусели по сравнению с шагом, определяемым числом пазов креста. Шаг поворота карусели, в этом случае, будет
(6.25)
где u – передаточное отношение зубчатой передачи.
В технологических машинах время выстоя транспортера используется для выполнения какой-либо операции – это рабочее время tp, а время движения – это потери времени, холостое время tx, поэтому стремятся увеличить tp и уменьшить tx.
Если кривошип мальтийского механизма, вращается с постоянной скоростью w1 = const, то угол поворота кривошипа aп (см. рис. 6.12), соответствующий повороту креста на один шаг
(6.26)
Угол поворота кривошипа aв, когда крест стоит
(6.27)
Время поворота креста
(6.28)
Время выстоя креста
(6.29)
Отношение времени поворота и выстоя
(6.30)
Из этой формулы следует: чем меньше пазов у креста, тем больше полезное время выстоя креста по сравнению со временем его движения. Однако с уменьшением числа пазов усиливается «мягкий» удар, поэтому кресты с числом пазов z < 4 не делают. При z = 4 K = 1/3. Это предельное для механизма мальтийского креста соотношение времен поворота и выстоя.
Мальтийский крест
Передача с мальтийским крестом 6 (рис. 23, а) обеспечивает плавное изменение скорости и ускорения. В момент входа ролика водила 5 в паз мальтийского креста скорость равна нулю. Затем скорость плавно возрастает от нуля до максимума, после чего плавно убывает от максимума до нуля в момент выхода ролика из паза. Плавное изменение скорости исключает появление ударов первого рода, возникающих при скачкообразном изменении скорости, характерном для рассмотренных выше механизмов.
Ускорение в момент входа и выхода не равно нулю и в эти моменты изменяется скачкообразно, на всем же протяжении поворота изменение ускорения происходит плавно. Скачкообразное изменение ускорения в момент входа и выхода вызывает появление ударов второго рода. Динамические нагрузки, появляющиеся при ударах второго рода, меньше динамических нагрузок, появляющихся при ударах первого рода. Благодаря указанному обстоятельству приводы с мальтийскими крестами находят значительное применение для периодического поворота многопозиционных столов, барабанов и револьверных головок, имеющих большой момент инерции.

Рис. 23 Привод с мальтийским крестом
Схемы приводов
Приводы с мальтийскими крестами могут иметь различную схему. В простейшей схеме (рис. 23а) водило 5 мальтийского креста 6, непосредственно связанного с рабочим органом 1, получает непрерывное вращение от привода 4. После поворота рабочий орган фиксируется фиксатором 2, привод 3 которого работает синхронно с вращением водила. При рассмотренной схеме все прочие движения рабочих органов должны быть выполнены в интервале между двумя смежными поворотами рабочего органа 1. Время, которое может быть использовано на все прочие движения, зависит от числа оборотов водила 5 в минуту и угла поворота водила за период поворота мальтийского креста. Поскольку при указанных условиях возникает зависимость между временем всех прочих ходов и скоростью вращения водила, а соответственно и временем поворота рабочего органа 1, то такое решение может привести к чрезмерному возрастанию времени поворота, что ведет к снижению производительности станка.
Указанного недостатка можно избежать при одновременном использовании в приводе однооборотной муфты 1 (рис. 23б) и мальтийского креста 2. Водило мальтийского креста получает в этом случае вращение от вала однооборотной муфты 1 и при выключенной муфте остается неподвижным. При включении однооборотной муфты водило делает один оборот и вновь выключается с помощью однооборотной муфты. В этом случае время поворота рабочего и органа определяется только величиной динамических нагрузок, возникающих при работе мальтийского креста. Динамические нагрузки, возникающие при включении муфты, малы, так как в момент включения муфты ускорение получают только промежуточные передачи и водило.
Область применения
Привод с однооборотной муфтой и мальтийским крестом широко используется в одношпиндельный токарно-револьверных автоматах для поворота револьверной головки.
Вместо однооборотной муфты для периодического поворота водила мальтийского креста может быть использован также отдельный электродвигатель, связанный через соответствующую понижающую передачу с валом водила. При повороте рабочего органа подается сигнал для включения электродвигателя. По окончании поворота рычаг фиксатора, работающего синхронно с водилом, нажимает на конечный выключатель и подает сигнал для выключения двигателя. При выключении двигателя включается тормоз. Непостоянство в положении водила в момент остановки не имеет никакого значения, так как эта ошибка не сказывается на процессе поворота мальтийского креста, поскольку водило в момент остановки не находится в зацеплении с крестом, а накопление ошибок не может возникнуть.
Подобные приводы используются для поворота многопозиционных столов агрегатных станков.
Механизмы мальтийского креста
Механизмы мальтийского креста (рис. 6.12) являются, по существу, разновидностью кулисных механизмов (см. рис. 6.10, в). Роль кулисы выполняют по очереди пазы 1 мальтийского креста 2, а роль ползуна – цевка 4.

Рис. 6.12. Механизм мальтийского креста:
1 – паз; 2 – крест; 3 – кривошип; 4 – цевка
Непрерывно вращающийся кривошип 3 своей цевкой 4 входит в паз креста и поворачивает его на угол Dj = 2p/z, где z = 3…20 – число пазов креста. Затем цевка выходит из паза, и крест останавливается до момента входа цевки в следующий паз. После выхода цевки из паза крест оказывается «на свободе» и может самопроизвольно повернуться. Для предотвращения самопроизвольного поворота в механизм встраивается фиксатор. Обычно (но не всегда) фиксатор выполняется в виде неполного диска 5, входящего в дугообразные вырезы креста на время его "выстоя".
Таким образом, крест и приводимые им в движение детали совершают периодические (шаговые) повороты. Времена поворота и выстоя креста определяются скоростью вращения кривошипа и числом пазов креста. Движение креста, как кулисы, является неравномерным – с разгоном и торможением.
Передаточное отношение механизма мальтийского креста u ¹ const. Также и КПД механизма h ¹ const. Примерный вид графиков j = f1(a), = f2(a),, = f3(a), где j – угол поворота креста, a – угол поворота кривошипа, приведен на рис. 6.13.
Максимальная угловая скорость креста равна
, (6.22)
где w1 – скорость вращения кривошипа;
(см. рис. 6.12).

Рис. 6.13. Перемещение, скорость и ускорение мальтийского креста
Максимальное угловое ускорение креста

(6.23)

(6.24)
В начале и конце поворота креста имеют место скачки ускорения и, как следствие «мягкие» удары, вызывающие дополнительные динамические нагрузки в механизме.
Длины кривошипа R = O1A и стойки L = О1О2 связаны зависимостью R = Lsin(p/z). Истинные размеры звеньев механизма выбираются исходя из: соображений компоновки, нагрузок в звеньях и шарнирах механизма, жесткости и точности механизма и др.
Механизм мальтийского креста широко применяется в транспортирующих устройствах технологических машин и линий, обеспечивая шаговое перемещение с плавным разгоном и торможением. На рис. 6.14, а изображена схема привода цепного линейного транспортера, а на рис. 6.14, б – схема привода кругового транспортирующего устройства – карусели.

Рис. 6.14. Привод транспортирующего устройства:
а – линейного, б – кругового;
1 – цепной транспортер; 2 – мальтийский крест; 3 – кривошип; 4 – карусель;
5, 6 – зубчатая передача
Кривошип 3 мальтийского механизма закреплен на выходном валу редуктора P. Мальтийский крест в схеме а поворачивает звездочки цепного транспортера, а в схеме б поворачивает шестерню 6 зубчатой передачи. Передача позволяет изменить шаг поворота карусели по сравнению с шагом, определяемым числом пазов креста. Шаг поворота карусели, в этом случае, будет
(6.25)
где u – передаточное отношение зубчатой передачи.
В технологических машинах время выстоя транспортера используется для выполнения какой-либо операции – это рабочее время tp, а время движения – это потери времени, холостое время tx, поэтому стремятся увеличить tp и уменьшить tx.
Если кривошип мальтийского механизма, вращается с постоянной скоростью w1 = const, то угол поворота кривошипа aп (см. рис. 6.12), соответствующий повороту креста на один шаг
(6.26)
Угол поворота кривошипа aв, когда крест стоит
(6.27)
Время поворота креста
(6.28)
Время выстоя креста
(6.29)
Отношение времени поворота и выстоя
(6.30)
Из этой формулы следует: чем меньше пазов у креста, тем больше полезное время выстоя креста по сравнению со временем его движения. Однако с уменьшением числа пазов усиливается «мягкий» удар, поэтому кресты с числом пазов z < 4 не делают. При z = 4 K = 1/3. Это предельное для механизма мальтийского креста соотношение времен поворота и выстоя.
Храповые механизмы
Храповый механизм передает движение только в одну сторону и, соответственно, позволяет превратить колебательные движения какого-либо звена механизма в однонаправленные шаговые перемещения. Например, толкатель 1 кулачкового механизма (рис. 6.15) совершает возвратно-качательное движение.
Рис. 6.15. Храповый механизм с приводом от кулачка:
1 – толкатель; 2 – рычаг; 3, 6 – собачка; 4 – пружина; 5 – храповое колесо
На рычаге 2, жестко связанном с толкателем, закреплена шарнирно собачка 3. Собачка поджимается пружиной 4 к храповому колесу 5 и входит в зацепление с зубьями этого колеса. При повороте рычага 2 против часовой стрелки, собачка поворачивает храповик 5, при движении рычага 2 в обратную сторону собачка выходит из зацепления с зубом храповика и храповик остается на месте. Угол поворота храповика на один шаг определяется числом z его зубьев (впадин) Dj = 2p/z.
Для гарантированного попадания собачки в следующую впадину при обратном ходе рычага, угол качания рычага должен быть немного больше угла Dj. Фиксация храпового колеса после завершения его поворота осуществляется различного рода тормозами и фиксаторами. Например, для исключения обратного хода храповика и связанных с ним деталей вводят вторую собачку 6, сидящую на неподвижной оси.
Качательное движение рычага 2 может быть реализовано не только кулачковым механизмом, но и другими механизмами, например, показанными на рис. 6.10. а, в или рис. 6.11.
Довольно часто в машинах применяются линейные храповые механизмы (рис. 6.16). Здесь, храповую рейку 1 толкает подпружиненная собачка 2. Собачку возвратно-поступательно перемещает цилиндр 3. Собачка 4 препятствует обратному ходу храповой рейки.
Рис. 6.16. Линейный храповый механизм:
1 – храповая рейка; 2, 4 – подпружиненная собачка; 3 – цилиндр
Храповой механизм не изменяет закон движения исполнительного звена, который задан кулачком или рычажным механизмом. Передаточное отношение храпового механизма u = 1.
Силовой расчет храпового механизма сводится к определению контактных напряжений в паре зуб-собачка и определению давлений в шарнирах. Передача сил от собачки на зуб храповика наиболее благоприятна при малых углах g между нормалью к грани зуба и линией, соединяющей середину зуба с центром шарнира собачки (рис. 6.16). Но при слишком малых углах g есть опасность выхода собачки из зацепления. Поэтому, рекомендуется выбирать g = 15. 20°. Как и в других, ранее рассмотренных механизмах, выбор размеров храповика, собачки и других деталей храпового механизма определяется множеством факторов, главный из них – компоновка.
Храповые устройства относительно просты и дешевы в изготовлении, широко применяются в различных приводах шаговых подач, например в линейных и карусельных транспортерах, в перекладчиках грузов, а также в грузоподъемных устройствах и в велосипедах в качестве обгонных муфт. В отличие от механизмов мальтийского креста, механизмы с храповым устройством не имеют жестких ограничений по соотношению времен движения и выстоя. Однако при работе храповых устройств неизбежны «жесткие» (скачок скорости) и «мягкие» (скачок ускорения) удары, а также шум. Поэтому в высокоскоростных приводах храповые устройства не применяются.
Редукторы и мультипликаторы
Редукторы и мультипликаторы предназначены для преобразования движения по скорости (угловой или линейной) и по усилию (моменту или силе). Редукторы и мультипликаторы могут быть вращательные — входное и выходное звено (вал) вращаются, поступательные — входное и выходное звено движутся поступательно и с различным движением звеньев. В последнем случае редуктор дополнительно выполняет функцию преобразования вида движения.
Редукторы
Вращательные редукторы чаще всего выполняются на основе зубчатых передач. Их и различают по виду передач: цилиндрические, конические, червячные, планетарные, волновые. Каждый вид редукторов имеет свои особенности: цилиндрический редуктор имеет высокий КПД, входной и выходной валы у него параллельны; конический редуктор также имеет высокий КПД, и позволяет передать движение через скрещивающиеся валы; червячный редуктор обеспечивает высокую плавность движения, имеет малые габариты, валы у него взаимно перпендикулярны; планетарный редуктор, как и червячный, компактен, входной и выходной валы у него, как правило, соосны; волновой редуктор имеет большое передаточное отношение при малых габаритах, отличается отсутствием геометрического люфта в зацеплении, валы у него соосны. Конечно, каждый тип редуктора имеет свои недостатки, ограничивающие его применение. Например, червячный редуктор. У него пониженный КПД, он требует хорошей смазки и охлаждения, у него ограничена скорость вращения входного вала. При однозаходном червяке, редуктор обладает свойством самоторможения, поэтому, его нельзя применять, если, в процессе движения, момент на выходном валу меняет свой знак (например, при торможении) и может оказаться больше допустимого по условию прочности деталей редуктора. У всех редукторов передаточное отношение
(6.31)
где wвх, jвх– скорость и угол поворота входного вала редуктора;
wвых, jвых – скорость и угол поворота выходного вала редуктора.
Соответственно, скорость выходного вала
(6.32)
Угол поворота выходного вала
(6.33)
Момент на выходном валу
(6.34)
где Мвх – момент на входном валу;
h – КПД редуктора.
КПД редуктора зависит от его типа и величины нагрузки. С уменьшением нагрузки КПД падает. У редукторов с низким КПД и большим передаточным отношением наблюдается самоторможение, приводящее к ударам при реверсе крутящего момента на выходном валу редуктора.
Редукция в поступательном движении может быть обеспечена самыми разными механизмами: клиновыми, рычажными, цепными, на основе зубчатых реек и шестерен и т.п. Простейшим редуктором может служить обыкновенный полиспаст (рис. 6.17).
Рис. 6.17. Полиспаст
Рис. 6.18. Клиновой механизм
Редукторы с преобразованием вида движения, как и поступательные редукторы, строятся на основе различных механизмов. Часто используется редуктор на основе пары винт-гайка (рис. 6.19). Его передаточное отношение u = wвх/vвых = jвх/sвых = 2p/t, где t – шаг винта.
Рис. 6.19. Редуктор на основе пары винт-гайка
При однозаходном винте с малым шагом, передаточное отношение такого редуктора может быть достаточно большим. Винт, в этом случае можно соединить напрямую с двигателем. А если в качестве винтовой пары использовать ШВП или РВП, получим редуктор без люфтов, высокой точности и жесткости и с высоким КПД.
Мультипликаторы
Мультипликаторы, как и редукторы, преобразуют движение по скорости и усилию. В отличие от редукторов, мультипликаторы имеют передаточное отношение u < 1, т. е. мультипликаторы повышают скорость выходного звена относительно входного, увеличивают перемещение выходного звена и уменьшают усилие на выходном звене. Как и редукторы, мультипликаторы могут быть вращательными, поступательными и с преобразованием вида движения. Вращательные мультипликаторы строятся, в основном, на зубчатых передачах и, прежде всего, на цилиндрических зубчатых колесах. Фактически, это обращенные редукторы, в которых вход и выход поменялись местами. КПД мультипликаторов существенно ниже КПД редукторов и, чтобы избежать самоторможения, в мультипликаторах используют передачи с минимальным трением.
Поступательные мультипликаторы часто используются в телескопических подъемных механизмах (рис. 6.20).
Рис. 6.20. Телескопический подъемный механизм:
1 – рабочий орган (например, вилы погрузчика); 2 – телескопические рамы; 3 – цепи или тросы; 4 – направляющая; 5 – гидроцилиндр
Передаточное отношение такого механизма
(6.35)
где n – число ветвей цепных или тросовых передач.
В механизме, показанном на рис. 6.20, n = 4, 1/n = 0,25.
Перемещение на выходе
Сила на выходе без учета трения в механизме
Мультипликатор с преобразованием вида движения изображен на рис. 6.21. Он построен на зубчатых передачах рейка-шестерня. Применяются такие мультипликаторы, например, в телескопических платформах.
Рис. 6.21. Мультипликатор с преобразованием вида движения:
1 – ведущая шестерня, 2 – промежуточная рейка, 3 – неподвижная рейка,
4 – промежуточная шестерня, 5 – выходная рейка
Передаточное отношение этого механизма
(6.36)
где u1-2 – передаточное отношение передачи шестерня-рейка (шестерня – 1, рейка – 2),
u2-5 – передаточное отношение передачи рейка-рейка (рейка – 2,
рейка – 5),

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой.
6.1. Кинематический анализ мальтийского механизма
Перед разработкой конструкции мальтийского механизма следует определить основные параметры и выполнить его кинематический анализ. Исходными данными являются параметры , , . Необходимо определить:
угол поворота креста за один оборот кривошипного вала,
угол рабочего поворота кривошипа,
геометрические размеры мальтийского механизма,
угловую скорость и угловое ускорение креста.
6.1.1. Определение основных параметров
Угол поворота креста за один оборот кривошипного вала вычисляется по формуле (см. рис.6), град,
Угол рабочего поворота кривошипа, при котором происходит поворот креста, равен, град,
Угол выемки фиксирующего диска, град.,
Длина кривошипа, мм,
Расстояние от оси вращения креста до начала паза, мм,
Диаметр цевки кривошипа, мм,
Диаметр креста, мм,
где С – фаска, равная 1,5. . .2 мм.
Длина паза креста, мм,
Диаметры валов кривошипа и креста принимают конструктивно, соблюдая условия, мм,
При разработке конструкции в дальнейшем и проверяют расчетами на прочность.
Отношение длины кривошипа к межосевому расстоянию равно
Диаметр скользящей поверхности диска кривошипа, мм,
6.1.2. Определение угловой скорости и углового ускорения креста
Угловая скорость креста мальтийского механизма зависит от угла рабочего поворота кривошипного вала и определяется по формуле, 1/c,
Угловое ускорение определяется по формуле, 1/с ,
Расчеты по формулам (1) и (2) необходимо выполнить при значении , изменяющемся через от
соответствующем входу цевки кривошипа в паз креста, до
соответствующем выходу цевки из паза.
Нулевое значение угла соответствует положению кривошипа, когда он совмещается с линией, соединяющей оси валов 4 и 5 (см. рис.5).
Результаты расчетов рекомендуется свести в таблицы. По этим данным построить диаграммы и .
Указания по расчету основных параметров мальтийского механизма, определению угловой скорости и ускорения креста приведены в [1], с.438. . .442; [3], с.293. . .297; [4], с.172. . .174.
6.1.3. Построение планов скоростей и ускорений звеньев
мальтийского механизма
Перед построением планов скоростей и ускорений необходимо изобразить мальтийский механизм в выбранном масштабе.
Построение следует выполнить для трех положений мальтийского механизма:
а) для момента входа цевки кривошипа в паз креста, т.е. при ;
б) для момента поворота кривошипа на ¼ рабочего угла, т.е. при ;
в) для момента поворота кривошипа на ½ рабочего угла, т.е. когда ось кривошипа совмещается с линией, соединяющей оси валов 4 и 5.
При построении планов скоростей и ускорений считаются заданными угловая скорость , угол рабочего поворота вала кривошипа , число пазов креста , межосевое расстояние и длина кривошипа .
Используя результаты построения планов необходимо определить угловые скорости и угловые ускорения вала креста для указанных выше трех положений.
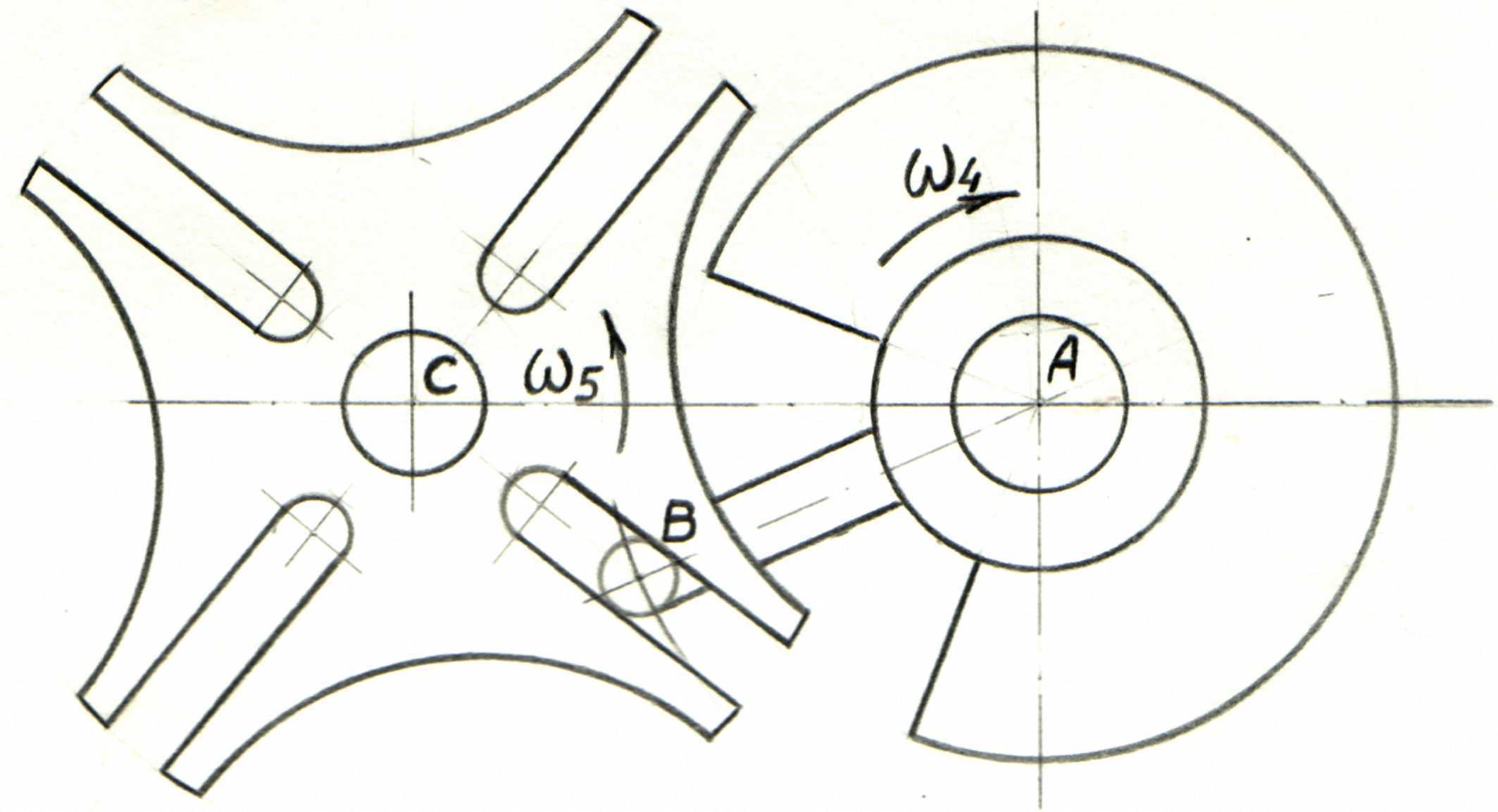
В качестве примера рассмотрим построения планов скоростей и ускорений для положения кривошипа, изображенного на рис.7,а.
Будем рассматривать точку В как точку, принадлежащую одновременно кривошипу и кресту. Движение точки В, принадлежащей кривошипу, считаем абсолютным. Точка В, принадлежащая кресту находится в сложном движении – в переносном вращательном с крестом и относительном прямолинейном вдоль паза креста.
Построение планов скоростей ведем по следующему векторному уравнению:
где – вектор абсолютной скорости точки В, равный по модулю и направленный перпендикулярно АВ; – вектор переносной скорости точки В, равный по модулю и направленный перпендикулярно ВС; – вектор относительной скорости точки В, направленный параллельно ВС.
Выполним построение плана скоростей при положении кривошипа, когда он повернулся на ¼ рабочего угла. От полюса (рис.7,б) отклады-
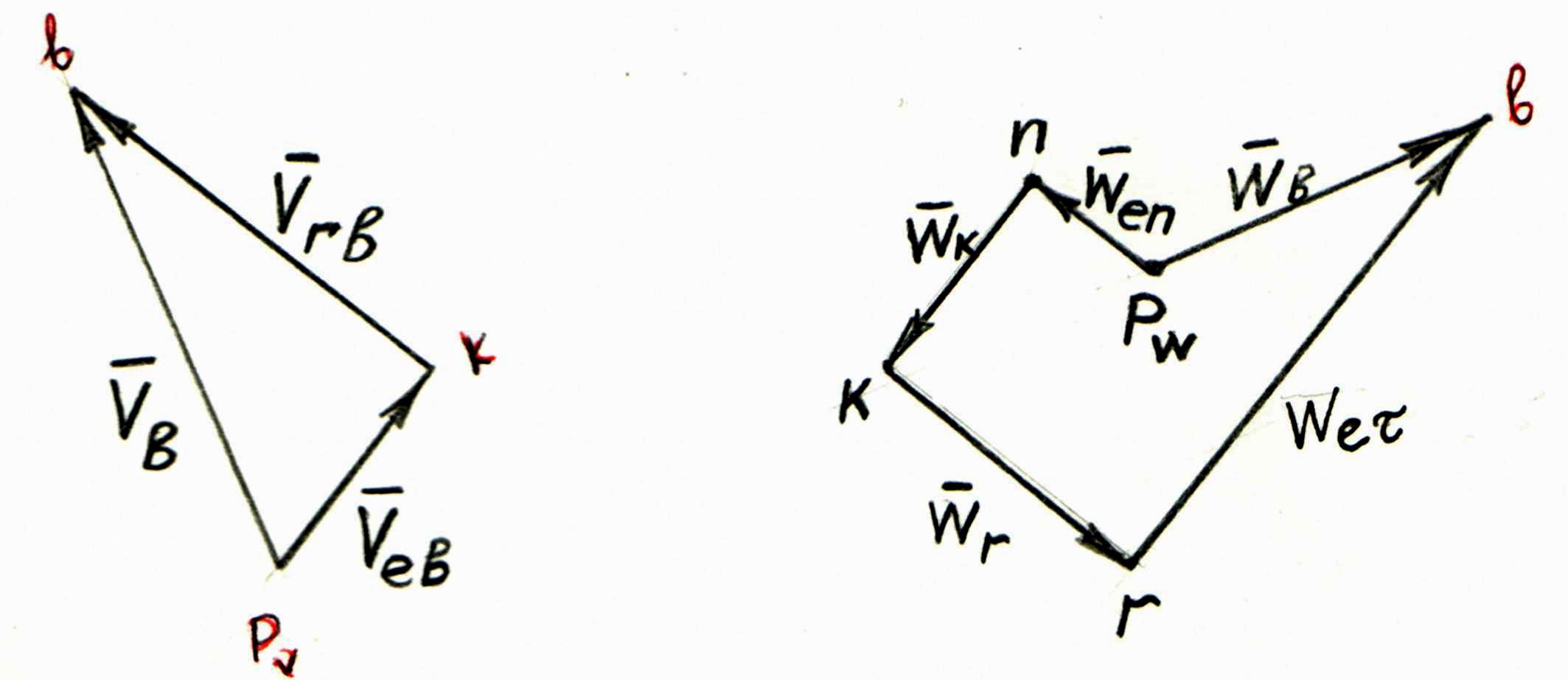
ваем от резок , изображающий в определенном масштабе вектор скорости . При этом , причем если изменяется в м/c, то масштабный коэффициент – в . ( показывает, сколько единиц скорости приходится на 1 мм отрезка ). Затем из точки проведем прямую перпендикулярно ВС, а через точку b – прямую параллельно ВС. Точка их пересечения k является концом вектора и началом вектора . Определим модуль вектора из плана с учетом масштабного коэффициента , т.е. (м/c). Так как скорость зависит от угловой скорости креста, то величина угловой скорости (1/c). Здесь – расстояние от точки В до центра вращения креста в м.
При построении плана скоростей для первого положения мальтийского механизма следует иметь в виду, что , а для третьего положения – .
Строим план ускорений мальтийского механизма. При рассмотрении ускорения точки В, принадлежащей кресту, следует учесть, что при переносном вращательном движении и относительном перемещении вдоль паза возникает также ускорение Кориолиса. Поэтому построение плана ускорений ведем по следующему уравнению
где – вектор абсолютного ускорения, равный нормальному ускорению точки В (при ), принадлежащей кривошипу, равный по модулю и направленный по АВ от точки В к точке А; – вектор нормального ускорения в переносном вращательном движении точки В, принадлежащей кресту, равный по модулю и направленный от точки В к точке С; – вектор касательного ускорения в переносном движении, направленный перпендикулярно СВ; – вектор относительного ускорения точки В, направленный вдоль паза креста по СВ; – вектор ускорения Кориолиса, равный по модулю и имеющий направление вектора , повернутого на в направлении угловой скорости (см. рис.7, а,в).
Выполним построение плана ускорений по векторному уравнению, в котором известны векторы по направлениям и модулям. Для векторов известны лишь линии их действия.
От полюса откладываем отрезок , который изображает на плане в определенном масштабе вектор . Масштабный коэффициент ускорений . показывает, сколько единиц ускорения в приходится на 1мм отрезка . Далее из полюса строим отрезок , изображающий вектор в том же масштабе, и через точку п проводим отрезок пк перпендикулярно , который изображает вектор ускорения Кориолиса . Так как известны линии действия векторов , то через точку к проводим прямую, параллельную СВ, а через точку b – прямую, перпендикулярную СВ. Точка их пересечения r дает конец вектора и начало вектора .
Определим модуль вектора из плана с учетом масштабного коэффициента, т.е. ( ). Затем вычислим угловое ускорение
При построении плана ускорений для первого положения мальтийского механизма обратим внимание на то, что , , и что для третьего положения , , .
Методика построения планов скоростей и ускорений звеньев механизмов приведена в [1], с.70. . .72, 75. . .80; [3], с.33. . .38; [4], с.79. . .96.
Реферат: Проектирование механизма поворота автоматизированных станков

Санкт - Петербургский
государственный политехнический университет
Расчётное задание № 1
Проектирование механизма поворота
студент гр. 5043/10 Пискарёв П. Ю.
Работу принял: Петков П. П.
Механизмы поворота находят широкое применение в автоматах, агрегатных станках и автоматических линиях различного технологического назначения. Они используются для осуществления делительного поворота шпиндельных блоков, поворотных столов, каруселей, а также в механизмах ориентации обрабатываемых заготовок автоматизированного оборудования. Механизмы поворота могут быть механические, гидравлические, пневмогидравлические, и пневматические. Широко применяются в автоматах, агрегатных станках и автоматических линиях механические и гидравлические механизмы поворота.
Механические поворотные устройства в свою очередь можно разделить на четыре основные группы: зубчатые, рычажные, кулачковые и мальтийские механизмы. Основные требования, предъявляемые к механизмам поворота, следующие: быстрота, плавность и точность установки в рабочую позицию поворачиваемого узла, надежность и долговечность работы, простота конструкции.
Для обеспечения точного положения поворотных устройств после поворота и стабильности их положения под воздействием нагрузки применяют механизмы фиксации. Наибольшее распространение получили мальтийские механизмы, которые применяются для периодического поворота шпиндельных блоков, револьверных головок, поворотных головок, поворотных столов, каруселей и других узлов, в станках-автоматах и автоматических линиях.
По полученным исходным данным и приведённому в [1] и [2] алгоритму произвести проектировочный и проверочный расчёты мальтийского креста с использованием ПК MathCAD.
Весь расчёт, выполненный в MathCAD представлен в приложении.
Исходные данные
Индивидуальные данные по расчётному заданию
| Тип мальтийского механизма | Механизм с внешним зацеплением |
| Число пазов креста Z | 12 |
| Межосевое расстояние А, мм | 400 |
| Время поворота tд , с | 2,5 |
| Диаметр планшайбы D, мм | 1200 |
| Масса подвижного узла G, кг | 1200 |
1. Кинематический анализ и расчёт мальтийских механизмов
1.1. Основные особенности и принцип действия мальтийских механизмов
Наиболее широко применяют “правильные” мальтийские механизмы с внешним и внутренним зацеплением, а также сферические, обеспечивающие поворот узлов на равные углы с постоянной продолжительностью периодов простоя и движения. Мальтийские механизмы состоят из следующих основных элементов: мальтийского креста, кривошипа (поводка) с пальцем. Кривошип вращается с постоянной скоростью w0, а палец входит поочередно в радиальные пазы креста, поворачивая его каждый раз на 1/z оборота, где z-число пазов креста. После выхода пальца (ролика) из паза крест останавливается, и его положение фиксируется каким-либо устройством. Время поворота подвижного узла соответствует времени холостого хода, а время простоя – времени обработки в цикле технологического процесса.
Мальтийские механизмы отличаются высоким КПД и простотой конструкции. Они обеспечивают достаточную плавность и быстроту поворота при высокой надежности в работе. К их недостаткам относятся непостоянство скорости креста и связанных с ним деталей, большие пики ускорения (особенно при малом числе пазов), что вызывает повышенные инерционные нагрузки. Для обеспечения плавной работы механизма угловая скорость креста должна быть равна нулю в момент входа пальца кривошипа в паз креста и в момент выхода из него. Для этого центр кривошипа должен быть расположен так, чтобы в момент входа и выхода пальца вектор его скорости был направлен вдоль оси паза креста.
1.2. Определение углов поворота и коэффициентов времени работы мальтийских механизмов
Рис.1. - Расчётная схема мальтийского механизма: 1 – мальтийский крест; 2 – кривошип; 3 – палец
Полный угол поворота креста:
Время движения креста: .
Следовательно, частота вращения вала кривошипа:
Угловая скорость вращения кривошипа:
Время простоя (останова): ;
Время полного оборота кривошипа:
Коэффициент времени работы мальтийского механизма:
1.3. Определение угловой скорости и углового ускорения мальтийского креста
Угловая скорость креста:
где - угловая скорость кривошипа;
- текущий угол поворота кривошипа;
- передаточное отношение мальтийского механизма.
Максимальных значений угловая скорость креста и передаточное отношение достигают при
Рис. 2. – График зависимости угловой скорости поворота мальтийского креста от угла поворота кривошипа
Угловое ускорение креста:
где - коэффициент ускорения креста.
Значения углового ускорения креста в моменты начала и конца его поворота определяются по формуле при :
Рис. 3. – График зависимости углового ускорения мальтийского креста от угла поворота кривошипа
2. Определение основных параметров мальтийских механизмов
Диаметр ролика предварительно выбирают из соотношения: Примем
Длина паза креста:
Практически длина паза берётся на 2…3 мм больше, т.е. l= 107 мм.
Наружный диаметр креста:
где с = 2 мм – фаска.
Диаметр вала креста принимаем конструктивно = 65 мм при соблюдении условия:
Диаметр вала кривошипа принимаем конструктивно = 25 мм при соблюдении условия:
3. Силовой расчёт мальтийских механизмов
Силовой расчёт заключается в определении моментов и усилий, действующих в механизме, и мощности, необходимой для поворота креста. Кроме того, выполняют проверочные расчёты на прочность элементов, выбранных конструктивно (ось ролика, вал кривошипа и вал креста).
3.1. Определение моментов и усилий, действующих в механизме
Статический момент сил трения в опорах карусели:
где к1 = 0,004 мм - коэффициент трения качения;
D0 = 82,5 мм - диаметр окружности центров шариков (средний диаметр упорного подшипника 8213 ГОСТ 6874-75 [3]);
dш = 14,49 мм - диаметр шариков подшипника;
Момент инерции карусели:
где rk - приведённый радиус карусели;
Максимальное усилие на ролике кривошипа:
где а = 1,35; b= 0,422 - безразмерные коэффициенты, зависящие от числа пазов креста [1].
Максимальный момент сопротивления на валу креста
Средний крутящий момент на валу кривошипа:
где q= 0,2; m= 0,0465 - безразмерные коэффициенты, зависящие от числа пазов креста z;
Средняя мощность, необходимая для вращения кривошипа:
Максимальный крутящий момент на валу кривошипа:
где- V= 1,73 - коэффициент перегрузки, зависящий от числа пазов z[1].
3.2. Проверка на прочность деталей механизма
Ролик кривошипа проверяется на прочность при изгибе:
где Ми - изгибающий момент, действующий на ролик кривошипа,
[] – допускаемое напряжение при изгибе материала ролика (для стали 20Х, цементированной и закалённой до твёрдости HRCэ = 56-62, [и ] = 200 Н/мм 2 [1]).
где l1 = 50 мм (принято конструктивно) - расстояние от места заделки до точки приложения силы Рpmax на оси ролика кривошипа.
В нашем случае диаметр ролика (30 мм) удовлетворяет условию прочности.
Вал кривошипа проверяется на прочность при кручении:
где кр - допускаемое напряжение при кручении для материала вала кривошипа (для стали 45, закалённой до твёрдости HRCэ = 45-55, [кр ] = 100 Н/мм 2 [1]).
В нашем случае диаметр вала кривошипа (25 мм) удовлетворяет условию прочности.
Вал креста проверяется на прочность при кручении:
где [кр ] = 100 Н/мм 2 допускаемое напряжение при кручении для материала вала креста.
Диаметр вала креста (65 мм) также удовлетворяет условию прочности.
Рабочие поверхности паза креста и ролика проверяются на контактные напряжения:
где b1 = 30 мм – толщина креста (конструктивно);
rp = 15 мм-радиус ролика кривошипа;
[к ] - допускаемое контактное напряжение (для стали 20Х, цементированной и закалённой до твёрдости HRCэ = 56-62, [к ] = 240 Н/мм 2 [1]).
Список литературы
1. Автоматы и станочные комплексы: лабораторный практикум / Сост.: Н. Г. Переломов, П. П. Петков, Ю. М. Панкратов – Ленингр.: Изд-во гос. техн. ун-т, 1991. – 80 с.
2. Автоматы и автоматические линии. Ч.2 Системы управления и целевые механизмы / Под ред. Шаумяна Г. А. – М.: «Высш. школа», 1976. – 336 с.
3. ГОСТ 7872-89 - Подшипники упорные шариковые одинарные и двойные. Технические условия.
Читайте также: