
4ws toyota как работает
Обновлено: 02.07.2024
4 WS — система управления 4-мя колёсами.

Решил поделиться информацией с теми, кого это заинтересует. Итак, система 4WS — расшифровыается это как "4 wheels steering", говоря по-русски — 4 управляемых колеса. Преимущества полноуправляемого автомобиля очевидны, но система не получила широкого распространения, ввиду того, что помимо неоспоримых плюсов, имелись и минусы, о которых я расскажу ниже.
Первая подобная система появилась в 1987 году, на одной из модификаций автомлюиля Honda Prelude.Естественно, что остальные японские производители не обошли стороной этот момент, и уже в течение пары лет подобные системы были установлены на автомобилях Mitsubishi, Mazda и Toyota. Это явление коснулось лишь японских автопроизводителей по причине большого количества транспортных средств на квадратный километр, и вытекающих отсюда усложненных условий парковки и маневрирования.
Несмотря на попытку многих автопроизводителей переплюнуть друг друга, самую простую, недорогую и легкую систему (
15 кг) предложила именно Хонда.
Теперь давайте рассмотрим для чего всё это собственно нужно?
Одно из очевидных преимуществ — повышенная маневренность в стесненных городских условиях, и при парковке.
Второй момент — повышенная устойчивость при резких маневрах на высокой скорости.
У системы 4WS два режима работы, которые привязаны к скорости автомобиля. На невысоких скоростях при повороте руля в одну из сторон, задние колёса поворачиваются в сторону противоположную передним, тем самым сильно сокращая радиус поворота, или разворота.
На скорости задние колёса поворачиваются в ту же сторону, что и передние, тем самым обеспечивая увеличение мгновенного радиуса поворота, это приводит к уменьшению сил инерции, которые действуют на автомобиль, а это позволяет ему изменить траекторию, практически без риска сорваться в занос.
Вот здесь появляется вопрос "Каковы пределы?"
Отвечу так — для того, чтобы управлять автомобилем оснащенным такой системой нужна практика и привычка, ведь заносы все таки случаются, как раз из-за работы системы они происходят с легким запаздыванием, и человека неопытного могут застать врасплох, но я надеюсь, что немного людей, которые будут на скорости 120 км/ч пробовать вписаться в 90 градусный поворот.
Принцип работы системы основан на двух датчиках(на Прелюдах 4-го поколения датчиков было 3), один из которых установлен на рулевой рейке, а другой — под рулевым колесом, так же используется датчик скорости, все эти показания отправляются на блок управления 4ws, который собственно и отдает команды на электропривод задней оси.
Теперь о минусах: Система достаточно капризна, чаще всего выходят из строя датчики, и возникают люфты на металлических частях механизма управления, ввиду износа. Но весь механизм вполне ремонтопригоден, и достаточно 1 раз привести его в чувство, и он будет работать достаточно долго.
Единственный нюанс — автомобилям оснащенным такой системой необходим специализированный сход-развальный стенд, и процедура настройки датчиков, но это вполне возможно сделать на СТО официального дилера Хонда.
4WS: история создания полноуправляемого шасси Honda
История разработки

После проработки теории, инженеры выявили два базовых принципа работы полноупраляемого шасси. На низких скоростях до 30 км/ч, задние колеса должны поворачиваться в противоположную сторону от передних, а на высоких в ту же самую.

В 1978 году, компания Хонда получила патент, а инженеры приступили к постройке первого ходового макета. В 1981 году он был создан на базе двух передних половинок Honda Accord. Как вспоминает Фурукава, у команды были опасения в эффективности и безопасности полноуправлемого шасси, но они оказались напрасны. Испытания показали состоятельность системы 4WS.
4WS первого поколения
Спустя шесть лет 4WS, появилась в качестве опции на Honda Prelude третьего поколения. Причем не дешевой, за нее приходилось доплачивать 216 тыс. йен.
Принцип работы полноупраляемого шасси Honda Prelude довольно прост и изящен. Под днищем автомобиля проходил небольшой карданный вал, который связывал рулевую рейку и задний поворотный редуктор. При незначительном повороте руля задние колеса поворачивались на максимальный угол в 1,5° в одну сторону с передними, тогда как при парковке до 5° в противоположную.
Влияние на индустрию

Безусловно полноуправлямое шасси не является изобретением компании Хонда. Еще в начале XX века выпускались грузовики, трактора и другая колесная техника с поворотными колесами. Но именно Хонды конца 80-х с системой 4WS, установили новый стандарт управляемости и послужили толчком, после которого другие компании стали внедрять аналогичные системы в своих машинах.
Система 4WS
К примеру, автомобиль, совершая маневр на автостраде, будет словно не поворачивать, а "переходить" из ряда в ряд параллельно полосам разметки. Что это даст? Машина будет двигаться по дуге меньшей кривизны и большего радиуса. Момент, поворачивающий машину вокруг вертикальной оси, будет меньше — стало быть, уменьшится и риск потери курсовой устойчивости и развития заноса задней оси
МОЖНО РУЛИТЬ И ТЯГОЙ!
 (4WS)Передняя ось обычного автомобиля: при ускорении в повороте разгруженное колесо (слева) с меньшими возможностями по восприятию сил в пятне контакта (кружок меньшего диаметра) не реализует боковую составляющую |
Представим себе переднеприводный автомобиль, который проходит под тягой крутой поворот. Что происходит с передними колесами в пятне контакта с дорогой? Главными здесь являются две силы — "тяговая", которая ускоряет машину, и боковая, которая заставляет машину поворачивать. Обе они "опираются" на силу трения, возникающую в пятне контакта. А та, в свою очередь, ограничена лимитированными сцепными свойствами шины и покрытия.
 С системой ATTS: тяговая сила на разгруженном колесе стала меньше, и за счет этого появилась возможность реализовать поперечную силу. А увеличившаяся тяга на нагруженном колесе дополнительно "тащит" автомобиль в поворот |
Именно это и делает система ATTS. Она перераспределяет крутящий момент между ведущими колесами, убирая излишек тяговой силы с внутреннего колеса и перебрасывая его на более нагруженное внешнее. В результате у малонагруженной внутренней шины, освобожденной от излишка тяги, появляется больше возможностей для реализации боковой силы, так необходимой в повороте.
 Как и весельная лодка, автомобиль с системой ATTS "подгребает" наружным колесом, в результате чего появляется дополнительный момент, поворачивающий машину вокруг вертикальной оси |
А что дает увеличение крутящего момента на наружном колесе? Появляется дополнительный момент, который стремится "затащить" автомобиль в поворот. Здесь уместна аналогия с весельной лодкой: ведь на ней можно грести обоими веслами и управлять траекторией с помощью руля на корме, а можно одним веслом загребать сильнее — и лодка повернет в противоположную сторону.
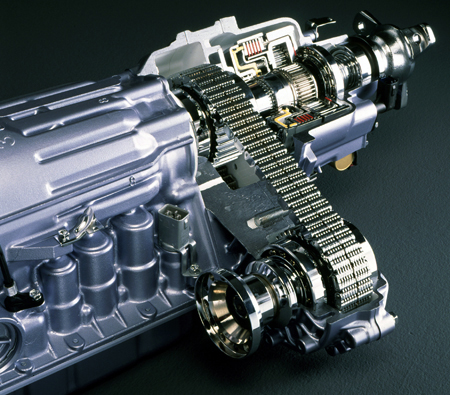
Задачу перераспределения крутящего момента выполняет хитроумный механизм с планетарными передачами и двумя многодисковыми пакетами фрикционов мокрого типа, как в гидромеханических коробках передач. Смонтирован исполнительный механизм системы ATTS после дифференциала коробки передач и умещается в небольшом цилиндрическом корпусе между полуосями передних колес.
Когда автомобиль едет прямо, фрикционы разомкнуты и планетарные шестерни системы вращаются вхолостую — ничто не мешает обычному дифференциалу выполнять свою работу, поровну распределяя идущий от двигателя крутящий момент между ведущими колесами.
Но вот повернут руль, и по команде от блока управления один из фрикционов с помощью гидравлического исполнительного устройства частично или полностью блокируется.При этом на одно из колес перебрасывается до 80 процентов крутящего момента с противоположного колеса.
Работой системы управляет электронный блок, анализирующий сигналы от нескольких датчиков. Его процессор всегда знает, с какой скоростью движется автомобиль, какова тяговая сила двигателя (то есть его обороты и степень открытия дроссельной заслонки), как повернуто рулевое колесо. А чтобы учесть действующие на автомобиль боковые силы, электроника системы ATTS пользуется информацией еще от двух датчиков. Один оценивает поперечное ускорение, а второй отслеживает угловую скорость вращения автомобиля вокруг вертикальной оси.
В результате система ATTS должна помочь автомобилю лучше держать дорогу и уменьшить свойственную переднеприводным автомобилям недостаточную поворачиваемость, когда машина стремится уйти наружу поворота, заставляя водителя компенсировать это доворотом руля. Как заявляет фирма, автомобиль с системой ATTS всегда демонстрирует нейтральную поворачиваемость, то есть лучше слушается руля и точнее следует заданной траектории маневра, требуя на виражах на 10—30% меньшего угла поворота руля, чем обычно.
К этому можно добавить, что система ATTS весит 20 кг (что вдвое больше, чем 4WS), и требует замены рабочей жидкости ATF через 100000 км пробега — как современная автоматическая коробка передач.
 Движение по прямой: крутящий момент распределяется поровну | ||
 Правый поворот: подтормаживается правый фрикцион, и больший крутящий момент идет на левое колесо | ||
 Левый поворот: подтормаживается левый фрикцион, и больший крутящий момент идет на правое колесо | ||
| Обозначения цифрами: 1 - трансмиссия; 2 - правое колесо; 3 - дифференциал; 4 - левое колесо; 5 - планетарные передачи; 6 - правый фрикцион; 7 - левый фрикцион |
Сейчас купе Honda Prelude 2,2 VTi — один из немногих автомобилей в мире, который одновременно имеет несколько версий с разными активными системами, улучшающими управляемость. Кое-что о впечатлениях наших экспертов от поездок на трех машинах вы уже прочли. Кстати, Honda имеет еще одну систему — VSA, Vehicle Stability Assist. Здесь задействованы антиблокировочная и противобуксовочная системы с вышеупомянутыми датчиками поперечного ускорения. VSA подтормаживает в повороте одно из колес, корректируя поведение автомобиля при сносе или заносе.
А еще — электроусилитель руля с переменным передаточным отношением. Но об этом — в другой раз.
История 4WS
История 4WS
Фактически, управление с 4 колесами — не сложная концепция, не имеет смысла выяснять, кто ее «изобрел». Наиболее трудно осуществить эту технологию эффективно, с достаточной выгодой, чтобы оправдать дополнительную стоимость. Первая компания, которая внедрила 4WS, была вероятно Мерседес-бенц. В 1938, было сделало военное транспортное средство для передвижения по пересеченной местности, называемое 170VL, которое поворачивало задние колеса обратно передним колесам, чтобы сократить радиус поворота.
Но Мерседес никогда не использовал 4WS в обычных автомобилях.
Первый 4WS автомобиль пути массового производства был Nissan Skyline (не GT-R) примерно в 1985.
В отличие от Мерседеса, задние колеса поворачивались в том же самом направлении, что и передние колеса с максимальным углом 0.5 градуса, что помогало стабильности. Однако, система Skyline не отвечает нашему определению 4WS, потому что тут просто поворачивалась целая задняя подвеска.
Honda Prelude — новая эра 4WS
Первое массовое производство 4WS автомобилей была Honda Prelude (1987). Наиболее интересным и также патентованным новшеством является то, что угол поворота задних колес зависит от передних колес.
При вращении рулевого колеса, первоначально задние колеса управляются слегка, в пределах 1.7 градуса, в том же самом направлении что и передние колеса. Это улучшает стабильность при движении с большой скоростью.
Продолжение поворота рулевого колеса полностью изменит направление поворота задних колес. Это используется, чтобы повысить маневренность движения на повороте с низкой скоростью.
Диаграмма на картинке показывает эту характеристику.
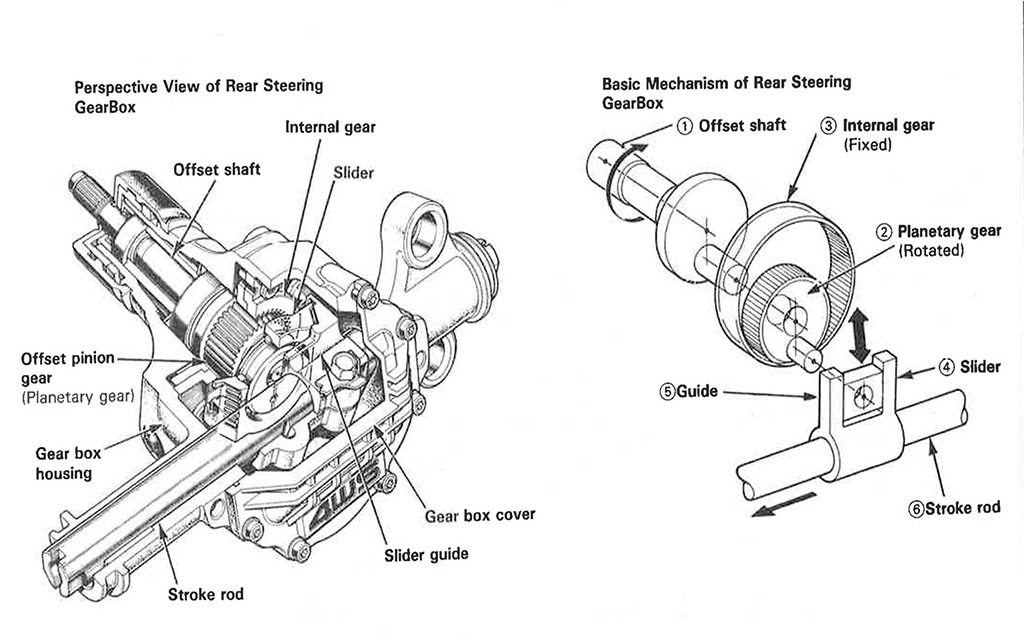
Механизм Honda Prelude был очень прост, только использует эксцентриковый вал, в комбинации с планетарным механизмом, вполне механическим.
Электронный вспомогательный механизм появился в следующем поколении Honda Prelude в 1992 году.
4WS — от популярности до упадка
От конца 80-х к сегодняшним дням, 4WS остался принятым исключительно Японскими автомобильными изготовителями.
Западные автомобильные изготовители, казалось, были не очень заинтересованными (Audi, по слухам, собирался развить 4WS для A8, но этого не случилось). Даже Японские производители сами начинают терять интерес.
Nissan:
после смерти 300ZX, пропуская 4WS от Infiniti Q45, только Skyline остается с предложением 4WS.
Honda:
с тех пор как появился активный дифференциал в самой последней Prelude, 4WS исчез в этой компании.
Mitsubishi:
после того как Galant VR4 и Diamante стали выпускаться без 4WS, только старый GTO все еще имеет 4WS.
Mazda: 929 — все еще единственная 4WS модель.
4WS — под серьезной угрозой со стороны Электронным Управления Стабильности и Yaw Control, оба из которых могут исправлять недостаточную управляемость подобно 4WS, но без большой дополнительной стоимости и веса.
Skyline HICAS
Однако, Nissan Skyline GT-R все еще доказывает, что 4WS достойна для применения. С добавлением компьютера, HICAS система позволяет сильно — управляемое движение, которое не может быть осуществлено любыми альтернативами.
При повороте, задние колеса будут управлять в противоположном направлении, сначала чтобы «обострить» угол поворота.
Тогда, когда по мнению датчиков, которые отвечает за управление, автомобиль развернулся, задние колеса, будет управляться в том же самом направлении как передние колеса, таким образом немедленно представляет скольжение с задней шиной, которые помогают стабильности.
Так как компьютер контролирует целый процесс, избыточная поворачиваемость — всегда под проверкой. Вы можете не бояться потери управления
4WS — это не 4WD ! 
Первые полноуправляемые версии, что появились среди модификаций автомобилей Honda Prelude в 1987 году, снабжались механической системой с хитроумной кинематической связью между рулевыми рейками передних и задних колес.
Кстати, тогда же на японском рынке произошел настоящий полноуправляемый бум: Mitsubishi Galant и Sigma, Mazda 626, а два года спустя и Toyota Celica — все обзавелись версиями с управляемыми задними колесами.
Применение систем управления всеми четырьмя колесами преследует три цели.
Первая — получить переменную чувствительность автомобиля к повороту руля. Ведь при тихой езде по городским улочкам лучше иметь «острое» рулевое управление- чтобы не накручивать баранкой при каждом маневре. А на автостраде «острый» руль может вызвать проблемы — машина будет слишком резко реагировать даже на небольшие подруливания. Вторая цель — улучшить маневренность автомобиля при парковке или развороте в стесненных городских условиях, то есть уменьшить радиус поворота. И третья — повысить курсовую устойчивость при резких маневрах на высокой скорости.
Нынешняя система 4WS (4 Wheel Steer, то есть 4 управляемых колеса), устанавливаемая по заказу на купе Honda Prelude 2,2 VTi, является развитием предыдущей электронноуправляемой системы, которая в 1991 году сменила механическую. Задние колеса здесь поворачиваются с помощью специального рулевого механизма с электроприводом, встроенного в довольно сложную заднюю подвеску. А управляет им специальный электронный блок, который получает от нескольких датчиков информацию о скорости автомобиля, об угле поворота руля, передних и задних колес и т. д.
Поворот задних колес в ту же сторону, что и передних, позволяет сохранить направление и скорость движения центра масс автомобиля, но значительно увеличить мгновенный радиус поворота. При этом уменьшаются действующие на автомобиль боковые силы и, как следствие, повышается курсовая устойчивость.
При движении на малой скорости задние колеса поворачиваются в противофазе с передними, и мгновенный радиус поворота уменьшается.
Работает система 4WS в двух режимах. На малой скорости задние колеса поворачиваются в сторону, противоположную передним, и при маневре той же кривизны руль нужно будет вращать на меньший угол.
То есть чувствительность рулевого управления будет выше, а вдобавок автомобиль станет более маневренным. К примеру, при развороте передние колеса будут вывернуты до упора влево, а задние — вправо на угол до восьми градусов. Радиус разворота при этом уменьшится на 15% по сравнению с обычным автомобилем и составит всего 4,7 метра!
А при движении на большой скорости — в быстром вираже или при перестроении из ряда в ряд на автостраде, — задние колеса, наоборот, будут поворачиваться на небольшой угол в ту же сторону, что и передние.

К примеру, автомобиль, совершая маневр на автостраде, будет словно не поворачивать, а «переходить» из ряда в ряд параллельно полосам разметки. Что это даст ? Машина будет двигаться по дуге меньшей кривизны и большего радиуса. Момент, поворачивающий машину вокруг вертикальной оси, будет меньше — стало быть, уменьшится и риск потери курсовой устойчивости и развития заноса задней оси.
Можно рулить и тягой !
А вот система ATTS (Active Torque Transfer System — система активного распределения крутящего момента), которую хондовцы тоже применяют для улучшения управляемости, работает по совершенно другому принципу.
Сначала фирма использовала этот механизм в межосевых дифференциалах своих полноприводных автомобилей для распределения крутящего момента между ведущими мостами.
А теперь приспособила его для легкового автомобиля с приводом на одну ось. Зачем?
Для этого сначала обьясним принцип ее действия.

Представим себе переднеприводный автомобиль, который проходит под тягой крутой поворот. Что происходит с передними колесами в пятне контакта с дорогой? Главными здесь являются две силы — «тяговая», которая ускоряет машину, и боковая, которая заставляет машину поворачивать.
Обе они «опираются» на силу трения, возникающую в пятне контакта. А та, в свою очередь, ограничена лимитированными сцепными свойствами шины и покрытия.
Передняя ось обычного автомобиля: при ускорении в повороте разгруженное колесо (слева) с меньшими возможностями по восприятию сил в пятне контакта (кружок меньшего диаметра) не реализует боковую составляющую.
С системой ATTS: тяговая сила на разгруженном колесе стала меньше, и за счет этого появилась возможность реализовать поперечную силу.
А увеличившаяся тяга на нагруженном колесе дополнительно «тащит» автомобиль в поворот.

Теперь присмотримся к внутреннему по отношению к центру поворота колесу. Из-за действия центробежной силы оно оказывается разгруженным, то есть в худших условиях по сцеплению с дорогой.
Соответственно, уменьшится и та суммарная сила, сложенная из тяговой и боковой, которую может воспринять колесо, и поэтому оно в меньшей степени будет способно ускорять и поворачивать автомобиль.
Вот если бы часть тяги перебросить на наружное по отношению к центру поворота колесо… Ведь именно оно при маневре оказывается более нагруженным и поэтому может воспринять больше сил — и боковых, и продольных.

Именно это и делает система ATTS.
Она перераспределяет крутящий момент между ведущими колесами, убирая излишек тяговой силы с внутреннего колеса и перебрасывая его на более нагруженное внешнее.
В результате у малонагруженной внутренней шины, освобожденной от излишка тяги, появляется больше возможностей для реализации боковой силы, так необходимой в повороте.
А что дает увеличение крутящего момента на наружном колесе?
Появляется дополнительный момент, который стремится «затащить» автомобиль в поворот. Здесь уместна аналогия с весельной лодкой: ведь на ней можно грести обоими веслами и управлять траекторией с помощью руля на корме, а можно одним веслом загребать сильнее — и лодка повернет в противоположную сторону.
Задачу перераспределения крутящего момента выполняет хитроумный механизм с планетарными передачами и двумя многодисковыми пакетами фрикционов мокрого типа, как в гидромеханических коробках передач.
Смонтирован исполнительный механизм системы ATTS после дифференциала коробки передач и умещается в небольшом цилиндрическом корпусе между полуосями передних колес.
Когда автомобиль едет прямо, фрикционы разомкнуты и планетарные шестерни системы вращаются вхолостую — ничто не мешает обычному дифференциалу выполнять свою работу, поровну распределяя идущий от двигателя крутящий момент между ведущими колесами.
Как и весельная лодка, автомобиль с системой ATTS «подгребает» наружным колесом, в результате чего появляется дополнительный момент, поворачивающий машину вокруг вертикальной оси.
Но вот повернут руль, и по команде от блока управления один из фрикционов с помощью гидравлического исполнительного устройства частично или полностью блокируется. При этом на одно из колес перебрасывается до 80 процентов крутящего момента с противоположного колеса.
Работой системы управляет электронный блок, анализирующий сигналы от нескольких датчиков. Его процессор всегда знает, с какой скоростью движется автомобиль, какова тяговая сила двигателя (то есть его обороты и степень открытия дроссельной заслонки), как повернуто рулевое колесо.
А чтобы учесть действующие на автомобиль боковые силы, электроника системы ATTS пользуется информацией еще от двух датчиков. Один оценивает поперечное ускорение, а второй отслеживает угловую скорость вращения автомобиля вокруг вертикальной оси.
В результате система ATTS должна помочь автомобилю лучше держать дорогу и уменьшить свойственную переднеприводным автомобилям недостаточную поворачиваемость, когда машина стремится уйти наружу поворота, заставляя водителя компенсировать это доворотом руля. Как заявляет фирма, автомобиль с системой ATTS всегда демонстрирует нейтральную поворачиваемость, то есть лучше слушается руля и точнее следует заданной траектории маневра, требуя на виражах на 10-30% меньшего угла поворота руля, чем обычно.
К этому можно добавить, что система ATTS весит 20 кг (что вдвое больше, чем 4WS), и требует замены рабочей жидкости ATF через 100000 км пробега — как современная автоматическая коробка передач.
Обозначения цифрами: 1 — трансмиссия; 2 — правое колесо; 3 — дифференциал; 4 — левое колесо; 5 — планетарные передачи; 6 — правый фрикцион; 7 — левый фрикцион.
Сейчас купе Honda Prelude 2,2 VTi — один из немногих автомобилей в мире, который одновременно имеет несколько версий с разными активными системами, улучшающими управляемость. Кстати, Honda имеет еще одну систему — VSA, Vehicle Stability Assist. Здесь задействованы антиблокировочная и противобуксовочная системы с вышеупомянутыми датчиками поперечного ускорения. VSA подтормаживает в повороте одно из колес, корректируя поведение автомобиля при сносе или заносе.
4WS в России
Полноуправляемый автомобиль на базе УАЗ-31512

На автомобиле реализована электромеханическая система управления поворотом колёс переднего и заднего моста. Управление поворотом колёс механически разделено, что позволяет поворачивать колёса автомобиля с разными алгоритмами:
поворот колёс только переднего моста;
поворот колёс только заднего моста;
поворот колёс переднего и заднего моста в противофазе (достигается радиус поворота в пределах 2-2,5 метров);
поворот колёс переднего и заднего моста синхронно (движение автомобиля боком).
Все эти режимы позволяют максимально повысить маневренность и проходимость автомобиля на пересечённой местности.
При разработке системы управления использовались штатные трансмиссионные элементы автомобиля УАЗ и оригинальные компоненты производства НПП «Солитон».
Этот автомобиль демонстрировался на выставках «Автоэкзотика-2004» и «Автомобили двойного назначения» в г. Бронницы, где пользовался неизменным интересом у зрителей.
Плавающий полноуправляемый автомобиль на базе серийно выпускаемых агрегатов отечественных легких внедорожников «ЛЕШИЙ»

Весьма похвально. Даже с учетом того, что это штучная ручная сборка при полном отсутствии хайтека. Однако, интересно — через сколько километров это чудо развалится
Авто-потроха: что у машинок внутри?
Устройство и принцип действия автомобильных технологий, узлов и агрегатов
Технология 4WS (+HICAS)
Бесспорное первенство в легковых 4WS-системах принадлежит японскому автопрому (Toyota, Nissan, Honda, Mitsubishi, Mazda и их премиум-клоны). Просто потому, что больше их серийно почти никто не делал :)
Принцип действия 4WS
4WS преследует три разные цели, достигаемые одним и тем же решением (изменением мгновенного радиуса поворота):
На картинке ниже:

Мгновенный радиус поворота, он же мгновенный центр поворота (МЦП) — центр пересечения перпендикуляров к направлению движения всех колес автомобиля.

На малой скорости и при значительном повороте руля задние колеса поворачиваются в сторону, противоположную передним, что при маневре той же кривизны позволяет крутить руль на меньший угол. Т.е. чувствительность рулевого управления и маневренность в таком режиме повышаются, радиус поворота уменьшается.

На большой скорости — в быстром вираже или при перестроении из ряда в ряд — задние колеса поворачиваются на небольшой угол в ту же сторону, что и передние. Т.е. автомобиль, совершая перестроение на автостраде или объезжая неожиданно появившееся препятствие, будет не столько поворачивать, сколько «переходить» из ряда в ряд параллельно полосам разметки.
Что это даст? Машина будет двигаться по дуге меньшей кривизны и большего радиуса. Момент, поворачивающий машину вокруг вертикальной оси (силы инерции), будет меньше — стало быть, уменьшится и риск потери курсовой устойчивости и развития заноса задней оси. Чтобы автомобиль не слишком резко реагировал на действия водителя в таком режиме, угол подруливания задних колес обычно ограничивают величиной в 5 градусов.
Конструкция 4WS
Разные фирмы использовали разные схемы 4WS с различной настройкой на углы поворота и скорости срабатывания:

Для обслуживания системы 4WS и, в частности, для установки развала-схождения требуются специальные стенды.
4WS Toyota
На примере Toyota Carina ED:
- На скоростях меньших 30 км/час – задние колеса поворачиваются в противоположную сторону от передних.
- На скоростях от 30 до 50 км/час – задние колеса не поворачиваются вообще.
- На скоростях свыше 50 км/час – задние колеса поворачиваются в ту же сторону, что и передние.
В машине установлены две клавиши управления системой 4WS:
Механическая часть системы представляет из себя рулевой вал и что-то типа редуктора в задней части машины, из которого выходят задние рулевые тяги.
4WS Honda


До 1992 года Honda использовала механическую систему привода 4WS. Справа: кинематическая схема согласующего механизма поворота задних колес купе Honda Prelude образца 1987 года.
При повороте рулевого колеса задние колеса сначала поворачиваются в пределах 1.7 градуса в том же направлении, что и передние колеса. Продолжение поворота рулевого колеса полностью меняет направление поворота задних колес (см. диаграмму слева).
Система Honda была не только простой и недорогой, весила всего 15 кг, однако ее эффективность и точность в работе были далеки от идеала.
Начиная с 1992 года, Honda заменила механическую систему 4WS электрогидравлической. Задние колеса в ней поворачиваются с помощью специального рулевого механизма с электроприводом, встроенного в довольно сложную заднюю подвеску. А управляет им специальный электронный блок, который получает от нескольких датчиков информацию о скорости автомобиля, об угле поворота руля, передних и задних колес и т.д.

В начале 21 века технология 4WS на моделях компании была сменена технологией ATTS.
4WS Mazda
Mazda широко применяла системы 4WS на своих моделях. Сравнительные тесты одной и той же модели (Xedos 9) показали следующую максимальную скорость в прохождении слалома между фишками, расставленными в 10 метрах одна от другой:
- Mazda Xedos 2.5 обычная — 101км/ч;
- Mazda Xedos 2.5 4WS — 126км/ч.
4WS Mazda электрогидравлическая и управляется компьютером с учетом скорости, радиуса поворота, состояния дорожного полотна и его наклона.


1 — гидравлический насос; 2 — гидроусилитель механизма поворота передних колес; 3 — передаточный вал к задним колесам; 4 — блок управляющих клапанов гидросистемы; 5 — гидроусилитель механизма поворота задних колес; 6 — электронный блок управления; 7 — датчики скорости; 8 — гидравлический аккумулятор.
4WS Nissan
По сути, первым 4WS-автомобилем массового производства был Nissan Skyline (не GT-R, 1985 год). Задние колеса поворачивались в том же направлении, что и передние, с максимальным углом 0.5 градуса за счет поворота задней подвески целиком.
Nissan HICAS
Ранние версии HICAS использовали гидравлический привод, запитанный от насоса ГУР и управляемый от датчика скорости.


Поздние версии HICAS, т.н. Super HICAS, используют электропривод на рулевой рейке, который конструктивно намного легче и управляется собственным компьютером. Обе системы, и HICAS и Super HICAS, ограничивают поворот задних колес углом в 10 градусов.



Диагностика HICAS
Прежде чем приступать к проверке HICAS, проверьте уровень жидкости в бачке ГУ. При необходимости — долейте. Марка используемой жидкости указана на крышке бачка. Двигатель должен быть прогрет, все нагрузки выключены, автомобиль установлен на ровной площадке, зажигание выключено, КПП в «нейтрали» (М/Т) или в «паркинге» (А/Т), передние колеса установлены прямо.
Если при включении зажигания лампа HICAS горит, то:
- R32: Проверьте уровень жидкости в резервуаре ГУРа (он же резервуар HICAS).
- R32 и R33: Проверьте все электрические соединения к HICAS.
Если лампа HICAS не гаснет, то необходимо зайти в режим диагностики:
После этих действий лампа HICAS на 5 секунд загорится, на 5 секунд погаснет и начнет моргать с интервалом около 1 секунды. Одновременно задние колеса начнут сами поворачиваться влево – вправо. Это позволяет проверять люфты и регулировать углы поворота.
Выход из диагностики в нормальный режим произойдет через 5 минут, либо если поехать быстрее 10км/ч, либо выключить зажигание.
Коды диагностики HICAS 1989-1993
Всего вспышек будет 9, потом все повторится сначала. Если вспышка короткая (0,1 сек), то кода нет (т.е. если лампа просто моргает короткими вспышками, то все в порядке). Если вспышка длинная (примерно 1 сек), соответствующий код есть.
Например. Первая вспышка короткая, вторая, третья, четвертая тоже короткие, а пятая длинная, потом снова все остальные короткие. Это значит, что все позиции в списке (см. ниже) исправны, кроме пятой. Пятая позиция – это датчик скорости. Раз вспышка длинная, то он (или его цепи) неисправен.
- 1. HICAS соленоид правый
- 2. HICAS соленоид левый
- 3. Отключен клапан
- 4. Соленоид ГУРа
- 5. Датчик скорости автомобиля
- 6. Датчик поворота руля
- 7. Датчик нейтрали КПП
- 8. (AT) Датчик стояночного тормоза, (MT) Датчик сцепления
- 9. (AT) Выключатель зажигания, (MT) Датчик нейтрали
Лампа HICAS быстро мигает в случае отсутствия ошибок или выдает флеш-код ошибки (длинная вспышка = первая цифра ошибки, короткие вспышки = вторая цифра ошибки).
- 11. HICAS блок управления
- 12. Нет питания на моторчик HICAS
- 13. Недостаточная мощность моторчика HICAS
- 21. Отсутствует сигнал от датчика скорости автомобиля
- 22. Отсутствует сигнал от датчика положения руля
- 23. Отсутствует сигнал или находится в нейтрали датчик положения руля
- 24. Отсутствует сигнал от заднего главного входящего датчика
- 25. Отсутствует сигнал от заднего дополнительного датчика
- 31. Отсутствует сигнал от датчика стояночного тормоза
- 32. (AT) Отсутствует сигнал от выключателя зажигания, (MT) Отсутствует сигнал от датчика нейтрали
- 33. Отсутствует сигнал оборотов двигателя
Модели легковых автомобилей с системой 4WS
4WS в России
Полноуправляемый автомобиль на базе УАЗ-31512
На автомобиле реализована электромеханическая система управления поворотом колёс переднего и заднего моста. Управление поворотом колёс механически разделено, что позволяет поворачивать колёса автомобиля с разными алгоритмами:
- поворот колёс только переднего моста;
- поворот колёс только заднего моста;
- поворот колёс переднего и заднего моста в противофазе (достигается радиус поворота в пределах 2-2,5 метров);
- поворот колёс переднего и заднего моста синхронно (движение автомобиля боком).
Все эти режимы позволяют максимально повысить маневренность и проходимость автомобиля на пересечённой местности.




При разработке системы управления использовались штатные трансмиссионные элементы автомобиля УАЗ и оригинальные компоненты производства НПП «Солитон».
Этот автомобиль демонстрировался на выставках «Автоэкзотика-2004» и «Автомобили двойного назначения» в г. Бронницы, где пользовался неизменным интересом у зрителей.
Плавающий полноуправляемый автомобиль на базе серийно выпускаемых агрегатов отечественных легких внедорожников «ЛЕШИЙ»




История 4WS








Перспективы 4WS
В настоящее время перспективные разработки в направлении 4WS сосредоточены на повышении не маневренности автомобиля, а его устойчивости.

На рисунке ниже: 1 — блок управления, 2 — электрические исполнительные механизмы, 3 — аккумуляторная батарея, 4 — датчик угла поворота руля:
4ws toyota как работает
Ремонт 4ws подруливающего механизма задних колес Camry sv30
4 WS это подруливание задних колес, по следующей схеме: 1-й режим) скорость авто от 0 до 40 км — задние колеса поворачиваются на достаточно большой угол и в противоположную сторону от передних, что сокращает угол поворота и позволяет делать интересные маневры, также в режиме при езде назад с 4 ws надо привыкать — очень своеобразно но есть кнопка 2 ws на панели и она отключает повороты задних колес только при включенной задней передачи.
2-й режим) скорость авто от 40 до 60 км — задние колеса не поворачиваются.
3-й режим) скорость авто от 60 км и более — задние колеса поворачиваются в туже сторону что и передние но на небольшой угол, что позволяет более устойчиво держать машину при маневрах.
Все это должно работать быстро и без сбоев.
У меня ничего не работало.
При самодиагностики следующие ошибки: 22, 32, 44 вроде они менялись всегда по разному. Система работала в аварийном режиме, 3-й режим всегда.
Начал с распространенной проблемы — датчик скорости на передней левой ступице.
Компьютер 4ws (который находится в заднем левом крыле) считывает сигнал с этого датчика и каким то чудом со спидометра, так машина узнает с какой скоростью ты едешь.
Почитав форумы оказалось что вместо этого датчика можно поставить любой другой: датчик ABS, волговский, датчик положения коленвала от 2110.


Был у меня датчик ABS от опель вектра, подточил немного его и воткнул его на место.
Он должен стоять в расстоянии 0.3-0.5 мм от зубьев и строго параллельно направлению зубьям на гранате (колечко там такое). При таком раскладе сигнал должен быть хороший. Соединил — проверил — опять дрянь, все те же ошибки.
Купил датчик положения коленвала от 2110 и фишку к нему = 350 р.
Вооружившись вот таким чудом осциллографом, стал считывать сигнал с датчика.



Подданкратив и сняв колесо, подцепился к датчику и погнали.
Оказалось что, хоть сопротивление у обоих датчиков почти одинаковое (от 0.6 до 1 кОм) сигнала от опелевского оооочень слабый, а от "10" в самый раз. Решил его и оставить. У датчика нет значения как его соединять, сигнал одинаков. Главное герметично.


При очередной проверке, ошибки такие же.
Забыл добавить при самодиагностики надо считывать моргание лампы 4ws на щитке приборов — её у меня тоже не было. Видимо выкинули чтоб не смущала.Я бы съездил бы к электрику, но в моих краях эта система дикая и никто не будет возиться с ней. Или это будет стоить НОРМАЛЬНО.
Так что решил буду добивать. Хоть было и 2 запасных плана, приварить все рычаги намертво, или поставить простой задний мост от донора.
Далее долго искал проблему в электропроводке.

Отсоединил в багажнике фишки которые идут на э.двигатели.

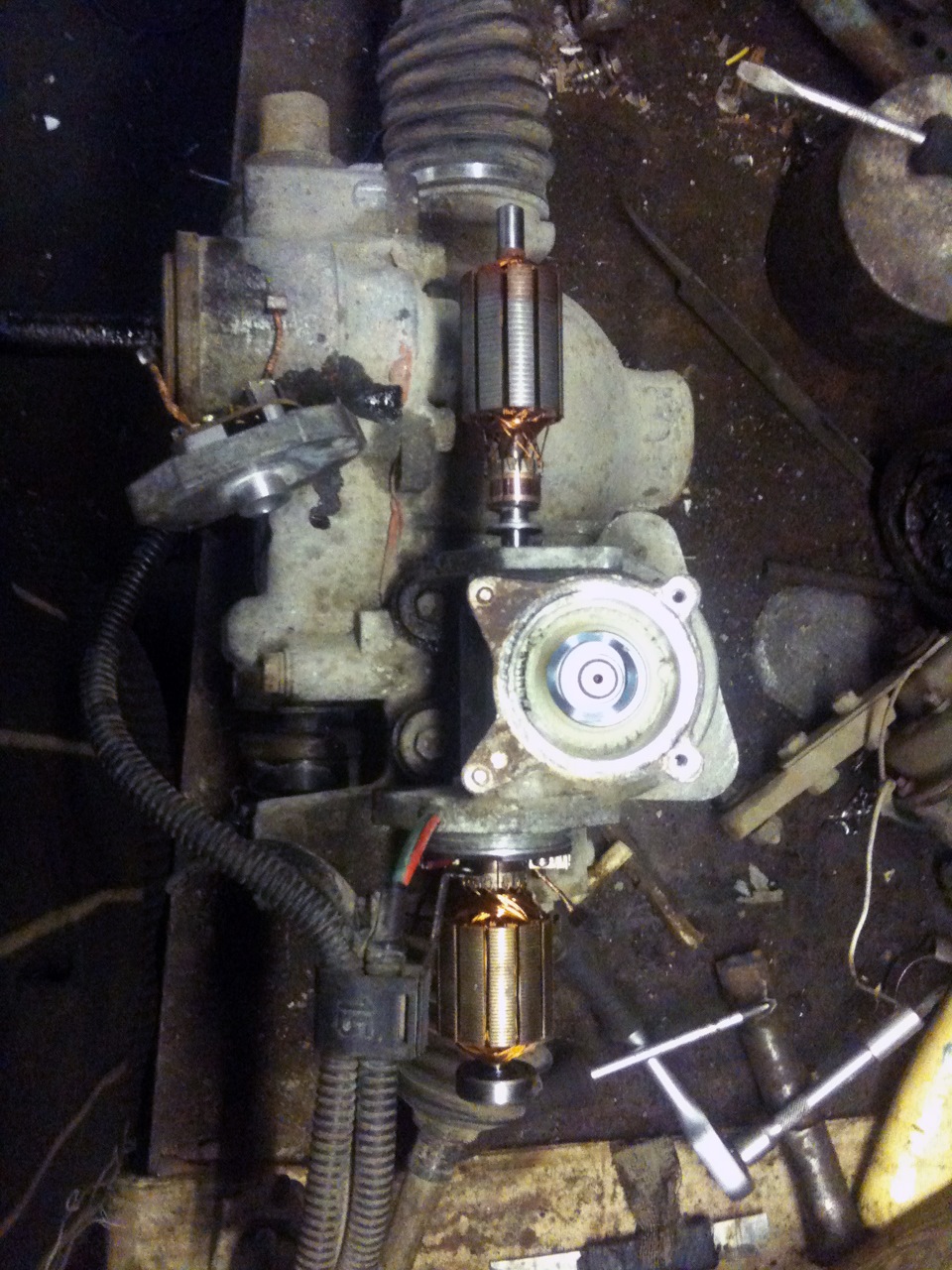
Главный электродвигатель и простой. Подаю на них ток от аккумулятора напрямую. И вот оно. Они иногда не срабатывают (если по ним постучать то крутятся). Видимо щеткам конец.
Скидываю весь задний узел и на верстак.




Щеткам конец, под замену. Припаял от старого моторчика стеклоподъемника. Их размер 4,5 на 4,5 мм.
Магниты оказались целыми. Правда грязи было которая мешала вращаться двигателю. Это все почищено.

Под верхнюю крышку тоже грязь попала и разъела винтики. Аккуратно все чистил и высверливал старые винтики. Нарезал новую резьбу и посадил все на герметик.
Так же вскрыл и прочистил датчик положения середины колес.
4ws toyota как работает
 |
То, что непричастные к Тойоте зачастую называют полный привод семейств Crown и Mark подключаемым - понятно и простительно. Сложнее сказать, почему так же думает едва ли не большинство владельцев этих автомобилей. И совсем уж интересно, какие чудовищные представления должны быть в головах у тех, кто самым натуральным образом пытается "отключать полный привод" для "экономии топлива, улучшения динамики и дрифта".
Система полного привода, носящая фирменное обозначение i-Four, впервые появилась на автомобилях Toyota в 1992 году. С тех пор она успешно применялась на моделях семейств Mark II и Crown разных поколений, а с середины 2000-х - на родственных им Lexus GS и IS.
Схема использовалась на АКПП A340H (второго поколения) и A341H, а затем и на более современных автоматах A750H, A760H, A761H, совмещенных с раздаточной коробкой UF1AE.
 |
| Раздаточная коробка UF1AE. 1 - выходной вал коробки передач, 2 - цепь, 3 - блок клапанов раздаточной коробки, 4 - клапан 4WD, 5 - задний выходной вал раздаточной коробки, 6 - межосевой дифференциал, 7 - муфта блокировки дифференциала |
• Тип привода - постоянный полный.
• Межосевой дифференциал - цилиндрический, несимметричный (распределение момента между передней и задней осями в свободном состоянии - 30:70).
Точное соотношение можно подсчитать по количеству зубьев шестерен планетарного ряда:
i12 = -z2/z1
i31 = 1/(1-i12) = z1/(z1+z2) = 37/120
 |
| Раздаточная коробка (принципиальная схема). 1 - солнечная шестерня, 2 - эпицикл, 3 - водило, 4 - сателлит, 5 - задний выходной вал, 6 - многодисковая муфта блокировки, 7 - выходной вал коробки передач, 8 - цепь, 9 - передний выходной вал. |
Водило планетарного ряда соединено с выходным валом АКПП. Водило и солнечная шестерня связаны между собой муфтой блокировки. От солнечной шестерни вращение через цепную передачу идет на передний карданный вал, от эпицикла идет вращение на задний карданный вал.
 |
| Распределение потоков мощности. 1 - АКПП, 2 - цепь, 3 - передний кардан, 4 - муфта блокировки, 5 - эпицикл, 6 - сателлит, 7 - водило, 8 - солнечная шестерня, 9 - задний кардан |
• Блокировка межосевого дифференциала осуществляется многодисковой гидромеханической муфтой с электронным управлением. Муфта расположена между планетарным дифференциалом и секцей переднего привода, состоит из "мокрого" пакета фрикционов и поршня. Конструктивно аналогична муфтам автоматической трансмиссии, работает за счет трения, которое возникает при различной скорости вращения нажимных и фрикционных дисков. Степень блокировки дифференциала регулируется изменением давления, действующего на поршень муфты. В зависимости от степени блокировки распределение момента между передней и задней осями может составлять от 30:70 до 50:50.
 |
| Многодисковая муфта. 1 - корпус муфты, 2 - выходной вал коробки передач, 3 - поршень, 4 - межосевой дифференциал, 5 - задний выходной вал, 6 - водило планетарной передачи, 7 - ступица муфты, 8 - пакет фрикционов |
• Управление осуществляется электронным блоком ABS (на поздних моделях функция была вынесена в отдельный блок управления 4WD), на основании показаний датчиков частоты вращения колес, датчика положения рулевого колеса и датчика положения дроссельной заслонки.
 |
| Управление 4WD (поздний вариант). 1 - передний датчик ABS, 2 - датчик положения дроссельной заслонки, 3 - задний датчик ABS, 4 - датчик положения рулевого колеса, 5 - выключатель запрещения запуска, 6 - блок управления двигателем, 7 - блок управления 4WD, 8 - блок управления ABS/VSC, 9 - маршрутизатор, 10 - комбинация приборов, 11 - клапан 4WD. a - CAN |
Непосредственное управление муфтой осуществляется с помощью линейного электромагнитного клапана (клапан 4WD), клапан-модулятора и золотникового клапана, которые расположены в блоке клапанов раздаточной коробки.
К раздаточной коробке подводится линейное давление от АКПП. С помощью клапан-модулятора и клапана 4WD из него модулируется управляющее давление на золотниковом клапане, который, в свою очередь, из линейного давления модулирует рабочее давление, непосредственно действующее на поршень муфты блокировки дифференциала.
 |
| Гидросхема. 1 - масляный насос, 2 - клапан-модулятор, 3 - клапан 4WD, 4 - золотниковый управляющий клапан. a - линейное давление, b - управляющее давление, c - давлеие в муфте |
Блок клапанов установлен в нижней части раздаточной коробкой под отдельной крышкой.
 |
| Блок клапанов. 1 - секция клапан-модулятора, 2 - секция управляющего клапана, 3 - крышка блока, 4 - корпус блока, 5 - клапан 4WD |
Якорь клапана 4WD выдвигается пропорционально силе тока, поданного на электромагнит, и перемещает золотник. При этом подпружиненный золотник модулирует управляющее давление, соответствующее усилию воздействия якоря - то есть пропорциональное силе тока.
| |
| Клапан 4WD. 1 - золотник, 2 - якорь, 3 - электромагнит |
Управляется клапан по принципу ШИМ - импульсный сигнал с выводов SLC+/SLC- блока позволяет изменять силу тока на электромагните в пределах 0-3 ампер.
 |
Производитель описывает несколько общих алгоритмов управления:
- Старт с места. Используются данные датчика положения дроссельной заслонки, выключателя стоп-сигналов. Дифференциал замыкается в самом начале старта, чтобы предотвратить пробуксовку, облегчить трогание на подъеме или на скользком покрытии.
- Поворот на низкой скорости. Используются данные датчика положения рулевого колеса. Степень блокировки дифференциала минимальна для предотвращения tight corner braking (когда полноприводный автомобиль маневрирует с большим углом отклонения колес и малой скоростью на твердом покрытии - например при парковке - возникает заметная разница в радиусе движения передних и задних колес, и если она не может быть компенсирована проскальзыванием колеса или работой дифференциала, то возникает эффект торможения).
- Пробуксовка при старте. Используются данные датчика положения дроссельной заслонки, датчика положения рулевого колеса и колесных датчиков. Если автомобиль трогается с вывернутыми колесами, то предыдущий алгоритм предписывает распустить дифференциал. Однако на скользком покрытии чрезмерная тяга на задних колесах может вызвать занос, и для борьбы с его развитием блок определяет разницу в частоте вращения передних и задних колес и оперативно задействует муфту.
- Пробуксовка в движении. Используются данные колесных датчиков. При движении на скорости выше средней блок определяет разницу в частоте вращения колес и рассчитывает необходимую для стабилизации степень блокировки муфты.
- Ускорение. Используются данные датчика положения дроссельной заслонки и колесных датчиков. При разгоне со средней или высокой скорости блок контролирует разницу в частоте вращения передних и задних колес и рассчитывает необходимую для предотвращения пробуксовки и стабилизации степень блокировки муфты.
Вмешательство со стороны водителя в управление 4WD не предусматривается.
На ранних моделях использовались два индикатора комбинации приборов:
- "Slip" загорается при пробуксовке какого-либо колеса и информирует водителя о движении по скользкому покрытию. На моделях с VSC он указывает на срабатывание системы стабилизации.
- "4WD" должен загораться на несколько секунд после включения зажигания и гаснуть. Постоянно включенный индикатор указывает на неисправность системы полного привода.
 |
В дальнейшем информирование о неисправности 4WD было возложено исключительно на борткомпьютер.
• Профильные форумы, драйв, youtube и поисковики обильно замусорены темами вроде "отключение полного привода на mark2", "4wd с кнопки", "как отключить вэдэ на лето" - причем с массой соответствующих фото- и видео-гайдов. В порядке вещей там деактивировать электронику тормозов целиком, вынув предохранитель ABS или отключив проводку к задним колесным датчикам. Или интеллектуально перевести ее в сервисный режим перемыканием выводов OBD-разъема. Или стать адептом "секты кнопочников", врезав выключатель в разрыв провода к клапану 4WD, дабы сохранить работу ABS.
Они почему-то не задумываются о том, что своими манипуляциями отключают только автоматическую блокировку, в то время как межосевой дифференциал по-прежнему честно обеспечивает постоянный полный привод. El sueño de la razón produce monstruos
Читайте также: