
Параметр адаптации регулировки холостого хода калина
Добавил пользователь Skiper Обновлено: 05.10.2024
Методика настройки хх
При построении относительно нестандартных двигателей (то есть там, где оставлено регулирование с помощью РХХ) довольна частая ситуация — полное или частичное отсутствие холостого хода, когда заставить работать его можно только постоянно подгазовывая, то есть выводя из режима ХХ, т.к система регулирования ХХ напрочь отказывается стабилизироваться. Иногда для получения более менее стабильных оборотов приходится прогревать двигатель почти до рабочей температуры.
Что же делать? Браться за инженерный блок J5(J7) Оnline Tuner. Но сначала немного теоретической информации:
П-регулятор который управляет углом зажигания и предназначен для точного регулирования, те регулирования при небольших отклонениях оборотов от желаемых. Если разность желаемых оборотов и текущих больше переменной "Зона нечувствительности", происходит изменение угла зажигания на ХХ:
UOZ = UOZXX + KUOZ * EFREQ, где:
UOZXX — УОЗ на ХХ минус Коррекция УОЗ на ХХ;
EFREQ — Текущая ошибка оборотов при регулировании.
MINEFR — Зона нечувствительности.
KUOZ — Коэффициент коррекции УОЗ, принимается равным "Пропорциональному коэффициенту регулятора УОЗ_1 (высокие обороты)", если ошибка положительна (EFREQ > 0) или "Пропорциональному коэффициенту регулятора УОЗ_2 (низкие обороты)", если ошибка отрицательная (EFREQ < 0).
Величина приращения УОЗ (KUOZ * FREQ) ограничивается величинами UDMIN и UDMAX взятыми из соответствующих таблиц "Минимальное и Максимальное смещение УОЗ".
Физически данное регулирование регулирование служит для обеспечения возврата фактических оборотов к желаемым: чем больше отличие оборотов от желаемых оборотов, тем больше изменится УОЗ в сторону для обеспечения возврата к ним, "Пропорциональный коэффициенту регулятора УОЗ 1" увеличивает обороты, если они меньше желаемых, а "Пропорциональный коэффициент регулятора УОЗ 2" снижает их.
Второй "регулятор" отвечает за работу РХХ. Механизм его регулирования немного сложнее П-регулятора, т.к. у РХХ нет четко заданной уставки для ХХ, РХХ приходится регулировать от того положения в котором он находится в момент наступления ХХ. Поэтому очень важно чтобы когда этот момент наступает, РХХ находился как можно ближе к тому положению в котором будет осуществляться регулирование. Для этого необходимо правильно настроить возврат оборотов их режима ПХХ.
Работа ПИ-регулятора определяется формулой:
SSM = SSM + TMFR * (KFRI * EFREQ + KFR * (EFREQ — EFRET)),
SSM — положение РХХ, шаг.
TMFR — Жесткость регулятора частоты вращения – коэффициент, задающий скорость изменения положения РХХ в зависимости от разницы оборотов от заданных.
KFR — Пропорциональный коэффициент РХХ – как и в случае с УОЗ регулированием, определяет отклонение РХХ в зависимости от разницы оборотов. Чем больше разница, тем больше будет смещение РХХ от текущего.
KFRI — Интегральный коэффициент РХХ – временной коэффициент, изменяет шаги РХХ, в зависимости от времени непопадания в заданные обороты. Чем дольше по времени обороты не были равны заданным, тем больше будет отклонение РХХ.
EFREQ — Текущая ошибка оборотов при регулировании.
EFRET — Ошибка оборотов на предыдущем цикле регулирования.
Если разница оборотов заданных и текущих превысила "Ограничение оборотов для интегратора", то она принимается равной этой величине.
Физический смысл регулятора сводится к тому, что чем больше отклонились обороты от заданных и чем больше по времени они были отклонены, тем больше будет разница в положении РХХ между текущим и следующим, то есть, в отличие от П-регулятора УОЗ, регулирование осуществляется ступеньками, РХХ будет приближаться к положению регулирования не мгновенно, а значит возможно перерегулирование — срыв ХХ в синусоидальные колебания оборотов со значительной амплитудой.
Очевидно, что мы никак не можем напрямую повлиять на текущее положение УОЗ или РХХ на ХХ. Единственное чем мы можем оперировать, это коэффициентами, причем во время настройки РХХ нужно чтобы нам не мешал УОЗ и наоборот.
Для начала нужно выбрать желаемые обороты ХХ. Рекомендуется выбирать обороты чуть выше гарантированных, для того, что бы избежать проблем при движении на ПХХ и при значительном изменении нагрузки.
Настройка проводится в три этапа:
Этап 1. Предварительная настройка ПИ-регулятора РХХ.
Выставляем смещение РХХ при включении вентилятора в 0 (По окончании настройки его нужно вернуть обратно). Выставляем "Ограничение оборотов для интегратора" примерно на две трети значения разности между желаемыми оборотами ХХ и "вторым переходным режимом".
Пример: ХХ = 1100, обороты второго режима = 1400, тогда "Ограничение оборотов для интегратора" будет (1400 – 1100) * 2/3 = 200.
Это необходимо, чтобы "подхватывалось" регулирование в момент входа в ХХ и при этом не было бы перерегулирования и резкого провала по оборотам. 2/3 — относительный параметр, полученный практически, придерживаться его необязательно, но, в любом случае, делать "Ограничение оборотов для интегратора" больше разницы ХХ и ХХ2 нет смысла.
Далее, открываем "Окно диагностики" в J5OLT, "Прямое управление ИМ" — фиксируем УОЗ, например, на 16 градусах. Далее, устанавливаем интегральный коэффициент в 0 и настраиваем только "Пропорциональный коэффициент". Нужно установить такой пропорциональный коэффициент, чтобы РХХ вставал навстречу изменяющимся оборотам. Это хорошо видно на графиках. Обороты должны перестать быть волнообразными, если они будут рваными, но удерживаться рядом с заданными, переходим к настройке П-регулятора УОЗ.
Этап 2. Настройка П-регулятора УОЗ.
После того как мы добились желаемого ХХ, который не плавает волнами, надо настроить точное регулирование УОЗ-ом. Для этого нужно иметь представление, в каких пределах мы можем с помощью УОЗ влиять на обороты. Открываем "Окно диагностики" в J5OLT, "Прямое управление ИМ" — фиксируем РХХ на среднем положении, в котором он пребывает и начинаем двигать углом, так же через прямое управление. При увеличении угла обороты должны расти, а при уменьшении — падать. Причем, если при увеличении УОЗ, они растут, то при дальнейшем увеличении они начинают опять падать. Увеличиваем, запоминаем угол, при котором обороты еще растут, но скоро будут падать, например, 27 град. (при 30, например уже начинается спад). Дальше снижаем до порога, при котором работа двигателя еще устойчива и обороты реагируют на уменьшение УОЗ и запоминаем его, например это 5 градусов (при 3, уже начинается неустойчивая работа или УОЗ перестает влиять).
Рассчитываем средний угол, который и будет углом зажигания. УОЗХХ = (27 + 5) / 2 = 16.
Рассчитываем максимальную величину смещения: UDMAX = — UDMIN = 27 – 16 = 11
Выставляем в прошивке УОЗ на ХХ 16 градусов, "коррекция УОЗ на ХХ" поднимаем/опускаем так, чтобы оно было равно 0 при рабочих температурах. Смотрим, какое наполнение мотора на ХХ, и в калибровках Максимального и Минимального смещения УОЗ выше этого наполнения ставим 1 и -1 градус соответственно, а ниже и при нем, 11 и -11 соответственно, тем самым не давая вывалиться углу за рабочие пределы регулирования.
Зона нечувствительности выставляем 10 оборотов, т.к П-регулирование это все-таки точная настройка на малых отклонениях.
На этом настройка П-регулятора закончена и опять переходим к ПИ-регулированию с помощью РХХ, не забыв зафиксировать УОЗ на наших вычисленных 16 градусах.
Внимательно следим за изменением оборотов и на то как УОЗ этому противостоит. Необходимо, используя коэффициенты, добиться чтобы УОЗ двигался "навстречу" скачку оборотов даже несколько больше чем это нужно, как бы упреждая раскачку оборотов, то есть, УОЗ должен резко реагировать на изменение оборотов и не должен быть плавным и волнообразным.
Сначала настраиваем Высокие обороты выставляя в ноль коэфф_2, и меняя коэфф_1 от 0 и вверх. Затем начинаем повышать коэфф_2 от 0 так же вверх, следя за изменением реагирования УОЗ на изменение оборотов. Если взять большие коэффициенты, то работа мотора будет резкой, жесткой на слух, произойдет перерегулирование и обороты опять начнут плясать. В идеале получаем скачущий УОЗ навстречу изменениям в оборотах.
Этап 3. Окончательная настройка ПИ-регулятора РХХ.
Теперь нам фактически надо повторить первый этап настройки, то есть добиться ровного ХХ, меняя П-коэффициент регулятора, не трогая И-коэффициент, который равен 0. Разница в том, что мы теперь делаем это при правильном угле и в будущем нам будет помогать УОЗ регулятор, но для начала нам надо правильно настроить Жесткость регулятора РХХ, чтобы она соответствовала условиям работы. Раньше ее настраивать не имело смысла, рабочее наполнение было бы другим.
Смотрим обороты ХХ/наполнение, открываем "Жесткость регулятора РХХ" и делаем так, чтобы при ХХ и наполнении на ХХ, в таблице стоял коэффициент 1, а при отклонении от режимной точки ХХ, коэффициент увеличивался.
Получится как бы трехмерная чашка, у которой на дне область режимных точек ХХ с коэффициентами 1 и по мере отдаления от ней коэффициент растет. Тем самым обеспечивается быстрое изменение числа шагов РХХ при удалении оборотов от заданных.
Рис.1 Примерный вид настроенной жесткости регулятора ХХ
Далее, окончательно настраиваем П-коэффициент, к этому времени, обороты уже должны быть достаточно устойчивыми и РХХ будет колебаться несильно, отзываясь на достаточно сильные изменения оборотов. Теперь дошла очередь до И-коэффициента. Увеличиваем его, плавно с 0, по одному шагу, смотрим что происходит с РХХ и оборотами. Увеличиваем до тех пор, пока РХХ и за ним обороты не начнут скачком, неожиданно изменяться верх/вниз от устойчивого состояния, делаем пару-тройку шагов назад и считаем настройку оконченной.
Как показала практика, численные значения И-коэффициента колеблется от 1/5 до 1/10 от значения П-коэффициента.
Напоследок отметим некоторые моменты при калибровки системы по дросселю.
Если вы используете прошивки, не поддерживающие коррекцию расчетного наполнения по положению РХХ, то использовать ПИ-регулятор РХХ в стандартном виде нецелесообразно, так как при изменении положения РХХ фактически будет меняться количество воздуха, поступающее в двигатель, что никак не будет учитываться и приведет к изменению состава смеси на ХХ. В совокупности с включенным лямбда — регулированием это может вызвать раскачку оборотов и выход состава смеси за допустимые пределы.
В таких случаях сам по себе РХХ оставить в системе можно и нужно, но критерии выбора П-коэффициента будут другими. В таких системах регулирование оборотов ХХ целесообразно возложить почти полностью на регулятор УОЗ, а регулирование количества воздуха через РХХ свести к минимуму. Для того, чтобы при включении нагрузки (например, фары) регулятор УОЗ не входил в насыщение (то есть, УОЗ не упирался в верхний предел), в качестве базового УОЗ на ХХ необходимо выбирать меньшие значения, чем описано выше. В этом случае, диапазон регулирования вверх будет шире, чем вниз. Из практики можно сказать, что средний УОЗ на ХХ необходимо опустить относительно расчетного на 3.6 гр. Дополнительной мерой борьбы с провалами оборотов при включении мощных электрических нагрузок может служить увеличение значений желаемого УОЗ на ХХ в зоне оборотов ниже желаемых оборотов ХХ на прогретом двигателе.
Рис.2 Примерный вид таблицы желаемого УОЗ на ХХ с коррекцией УОЗ на оборотах ниже ХХ
В этом случае, при резком падении оборотов отклик регулятора УОЗ будет более резким, так как коррекция УОЗ будет состоять из двух частей: прибавка, расчитанная П-регулятором по степени ошибки оборотов плюс табличная прибавка желаемого УОЗ.
Теперь рассмотрим особенности настройки регулятора РХХ. Как уже писалось выше, нам необходимо минимизировать движение РХХ, чтобы количество воздуха через РХХ оставалось практически неизменным при регулировании. Для этого необходимо исключить И-составляющую, путем выставления интегрального коэффициента в 0 и минимизировать пропорциональную составляющую так, чтобы РХХ в процессе регулирования РХХ не двигался (или двигался не более, чем на 1 шаг). Для настройки П-коэффициента надо временно отключить регулятор УОЗ путем выставления его коэффициентов регулирования в 0 и убрать коррекцию желаемого УОЗ (тоже временно) на оборотах ниже ХХ (см. Рис. 2). Выставьте пропорциональный коэффициент РХХ в минимальное значение (но не в ноль!). Попробуйте включить фары и обогрев стекла, при этом обороты ХХ упадут ниже желаемых (двигатель при этом глохнуть не должен). Увеличивая П-коэффициент, добейтесь того, чтобы РХХ открылся на 2-3 шага, при этом обороты ХХ могут и не подняться до желаемых, но повыситься. Сильнее открывать РХХ за счет пропорционального коэффициента нет необходимости, окончательную стабилизацию оборотов сделает регулятор УОЗ после его включения. Главное, чтобы РХХ компенсировал некоторую часть падения оборотов, чтобы регулятор УОЗ не «задирал» угол в верхний предел. После этого включите регулятор УОЗ и проверьте работу ХХ в том числе и при включении мощных нагрузок. В нормальном режиме регулирования (без включения нагрузок) положение РХХ должно либо оставаться неизменным, либо изменяться не более, чем на 1 шаг.
Вот, собственно и все. Этой методики вполне достаточно для того что бы настроить ХХ практически на любом авто с алгоритмическими системами впрыска, даже неисправном.
Диагностика неисправностей двигателя по значениям параметров работы ЭСУД ч.2
ТМОТ- Температура охлаждающей жидкости
Это показания с ДТОЖ. После ночного отстоя, утром, можно сравнить показания ДТОЖ с темпрературой воздуха за бортом (допуск расхождения +-2 гр.). Если отклонение значительно больше, то есть повод задуматься о замене ДТОЖ, если не было резкой смены температуры!
WDKB — Положение дроссельной заслонки
Сигнал с ДПДЗ. Закрытая ДЗ = 0%, полностью открытая ДЗ = 100% (70-86% — для контроллера BOSCH). При закрытой ДЗ контроллер запоминает величину напряжения, поступающего от ДПДЗ (0,3-0,7 В), и хранит её в ОЗУ.
При замене датчика нужно сделать инициализацию ЭБУ с БК, либо просто скинуть клемму АКБ. В противном случае новый сигнал с нового ДПДЗ может обмануть контроллер – обороты ХХ не будут соответствовать норме. Никаких дополнительных настроек не требуется.
Проверить исправность ДПДЗ можно плавно нажимая на педаль газа и наблюдая за изменением процента открытия ДЗ в меню "диагностический тестер" в БК. Увеличение процента открытия ДЗ при этом должно идти ровно, без скачков или провалов.
RKAT (TRA) — Аддитивная составляющая коррекции самообучением
Это почти FRA, но чуть проще:
Отвечает за работу двигателя при минимальных оборотах холостого хода. Обычные пределы его измерения – от -10% до +10%. Если ТRА станет меньше 8% или больше 8%, система самодиагностики включит в комбинации приборов «проверь двигатель» (ошибка РО171 или РО172).
Аддитивная составляющая коррекции самообучения TRA тоже отслеживает изменения коэффициента FR – но лишь при минимальных оборотах холостого хода. Изменение состава смеси, определяемое коэффициентом TRA, можно рассчитать по формуле в упрощенном виде, так как на составе смеси сказываются и другие параметры, которые здесь не рассматриваются. Итак, состав смеси меняется на величину: TRA *100/нагрузка. Для исправного прогретого двигателя на холостом ходу без дополнительных энергопотребителей (кондей, фары, обогрев стекол и зеркал, эл. вентиляторы и т.д.) близка к 20%. Допустим, TRA = +2% – в этом случае состав смеси соответствует 10-процентному обогащению. А если TRA = -5%, то смесь обеднится на 25%. А если двигатель не обкатан? Параметр нагрузки больше, около 25%. В этом случае при TRA = +2% произойдет обогащение смеси на 8%.
Как работает эта форма адаптации, рассмотрим на примере: Допустим, во впускной коллектор подсасывался воздух, обедняя смесь на 10%. Сначала это компенсировал текущий коэффициент коррекции времени впрыска FR – он увеличился до 1,1 и этим привел смесь к стехиометрии. Но после включения адаптации получаем: TRA = +2%, а коэф-т FR = 1,0.
При повторных пусках блок управления учитывает ранее подкорректированное значение TRA (учтено количественное влияние подсоса воздуха на состав смеси) – и даже на режиме прогрева, когда лямбда-регулирования нет, это обеспечивает устойчивую работу двигателя.
…Но вот подсос устранили. Смесь стала богатой. На это сразу отреагирует коэффициент коррекции времени впрыска FR – он снизится до 0,9. Топливоподача снизилась на 10%, смесь вернулась к стехиометрии. После включения адаптации TRA начнет уменьшаться, пока коррекция времени впрыска не вернется к величине FR = 1,0
Задача адаптации – компенсировать ошибки топливодозирования и вернуть к номинальному значению 1,0 коэффициент FR.
Чтобы коэффициент ТRА и время впрыска после устранения неисправности вернулись к номинальным значениям, долго ждать не надо. Достаточно воспользоваться функцией в ДСТ «сброс адаптаций» или «инициализация», либо отключить аккумулятор.
При снятии клеммы АКБ принимает фиксированное значение ТRA=0.
* После инициализации Аддитивная накапливается полностью на холостых минут через 15-20 после пуска.
TATEOUT — Коэффициент заполнения сигнала продувки адсорбера
Адсорбер продувается воздухом, а управляет процессом контроллер, по мере необходимости меняя время открытия клапана продувки адсорбера. Клапан продувки адсорбера является исполнительным механизмом. Проверить его можно сканером. Увеличиваем время открытия клапана ( TATEOUT растёт) и одновременно следим за параметром MOMPOS – положением РХХ. Если количество шагов уменьшается, значит, контроллер учёл дополнительный (продувочный) воздух с парами топлива, поступившего из адсорбера. Значит клапан работоспособен. При включенном зажигании и неработающем двигателе процент открытия клапана адсорбера всегда должен быть равен нулю (клапан закрыт). Управлять продувкой адсорбера контроллер начинает при условии, что двигатель прогрет до определённой температуры (обычно выше 60 гр.) и датчик кислорода вошёл в рабочий режим (сигнал с ДК стабилен, состав топливно — воздушной смеси определён, система работает по замкнутому контуру управления подачи топлива). Управление адсорбером осуществляется как на холостом ходу, так и на других режимах, за исключением режима отключения подачи топлива (торможение двигателем) и режима разгона. Чем выше обороты, тем больше процент открытия клапана продувки адсорбера. Работа клапана должна быть слышна по характерному постукиванию в моторном отсеке, можно почувствовать его вибрацию приложив к нему палец руки. Содержание углеводородов в продувочном воздухе очень нестабильно, поэтому, это значение не сохраняется в памяти ОЗУ, а постоянно контролируется и учитывается при топливодозировании за счёт параметров FR, FRA, RKAT (TRA). Продувкой адсорбера конроллер управляет медленно, постепенно открывая клапан продувки и отслеживая сигнал с ДК. Если продувочный воздух превышает стехиометрический состав ("богатый" парами топлива), то FR покажет менее 1 (богатая смесь), время впрыска форсунок чуть уменьшится. Если эта ситуация более-менее стабильна, то это отразится на параметрах FRA, RKAT (TRA). Если паров топлива мало, то ситуация с коррекцией будет с точность наоборот. Следует учитывать, что погодные условия и уровень топлива в баке оказывают большое влияние на процент содержания углеводородов в продувочном воздухе адсорбера. Так, при высоком уровне топлива в баке паров меньше, при низком — больше. При высокой температуре испарение больше, соответственно и продувочный воздух "богаче", больше обогащает топливо-воздушную смесь. При низкой температуре — наоборот.
При определении параметра TI рекомендуется заглушить продувочный шланг адсорбера, чтобы полностью исключить влияние продувочного воздуха на изменение времени впрыска форсунок.
Негерметичность клапана продувки адсорбера или его некорректная работа могут вызвать неустойчивый холостой ход, вплоть до остановки двигателя. Проверить можно отсоединив шланг продувки от клапана адсорбера и заглушив его, исключив тем самым подсос воздуха. Если работа двигателя стабилизируется — причина в клапане. Происходит это по одной причине — продувочный воздух поступает сразу за дроссельное пространство и не регулируется РХХ.
Калибровки и контрольная сумма прошивки контроллера
Калибровки ЭСУД хранятся в энергонезависимой памяти контроллера — изменить их при помощи сканера или бортового компьютера нельзя. Состояние ЭСУД фиксируется в виде букв и цифр (обычно четырёхзначно) и обозначается как CHKSUMFL. Изменение этих калибровок, скажем, с помощью специальной программы обеспечения (чип-тюнинг) на персональном компьютере изменит эту контрольную сумму. НО, контрольная сумма может измениться и в результате сбоя программного обеспечения! Выход: перепрограммирование, либо замена конроллера.
DMDVAD — Параметр адаптации регулировки холостого хода
Это коэффициент адаптации регулировки ХХ (в обиходе "PID-регулятор"). Он реагирует на факторы, долговременно сказывающиеся на работе двигателя (например, на изменение механических потерь в связи с постепенным износом двигателя). Этот режим адаптации ХХ контроллер включает после того, как двигатель проработает после холодного пуска не менее 10 минут, прогреется выше 85гр.С и начнётся Лямбда-регулирование. До включения в работу PID-регулятора ХХ корректируется за счет текущих параметров коррекции DMLLRI(интегральный) и DMLLR(пропорциональный). Например, к моменту включения DMDVAD плавно меняющийся DMLLRI(интегральный) уже достиг -5%. На это отреагирует DMDVAD – начнёт снижаться, пока не примет значение -5%, а «оперативный» DMLLRI(интегральный) вернётся к нулю. Схема взаимодействия этих коэффициентов та же, что и при коррекции топливопадачи. Если двигатель исправен и прогрет до рабочей температуры, то при минимальных оборотах ХХ значение коэффициента должно лежать в пределах от -3% до +3%. Предельными считаются значения от -5% до +5%. Коэффициент адаптации регулирования хол.
DMLLRI — Потребность в моменте для регулирования ХХ (I – часть)
Этот коэффициент изменяет параметры плавно. Его роль – оперативно корректировать случайные изменения оборотов. За этим параметром регулирования ХХ постоянно следит бортовая диагностика. Если, не смотря на все усилия контроллера, отклонения оборотов всё же выйдут за пределы +-100об/мин, бортовая диагностика зафиксирует неисправность и запишет в память ЭБУ код ошибки Р0506 либо Р0507 (обороты ниже или выше ожидаемых). DMLLRI(интегральный) и DMLLR(пропорциональный) совместно обеспечивают достаточно высокую точность поддержания оборотов — +-40об/мин. На исправном двигателе значения корректирующих параметров должны быть близкими к нулю. Подсос воздуха, снижение механических потерь в двигателе, подклинивание клапана РХХ в открытом положении — отклоняют параметры коррекции в минус. Повышенные механические потери или клапан РХХ, заклинивший прикрытым, отклоняют параметры коррекции в плюс. Если двигатель исправен и прогрет до рабочей температуры, то при минимальных оборотах ХХ значение коэффициента должно лежать в пределах от -3% до +3%. Предельными считаются значения от -5% до +5%. Интегральный коэффициент DMLLRI не хранится в ОЗУ и перед очередным пуском равен нулю.
DMLLR — Потребность в моменте для регулирования ХХ (PD – часть)
Это «быстродействующий» коэффициент, меняющийся скачком, как и его действие (желаемое изменение крутящего момента для поддержания оборотов ХХ). Его роль – оперативно корректировать случайные изменения оборотов. На исправном двигателе значения корректирующих параметров должны быть близкими к нулю. Подсос воздуха, снижение механических потерь в двигателе, подклинивание клапана РХХ в открытом положении — отклоняют параметры коррекции в минус. Повышенные механические потери или клапан РХХ, заклинивший прикрытым, отклоняют параметры коррекции в плюс. Если двигатель исправен и прогрет до рабочей температуры, то при минимальных оборотах ХХ значение коэффициента должно лежать в пределах от -3% до +3%. Предельными считаются значения от -5% до +5%.Пропорциональный коэффициент DMLLR не хранится в ОЗУ и перед очередным пуском равен нулю.
UB — Напряжение бортовой сети
В зависимости от типа генератора может быть в пределах 13,0 – 15,8 В. при работе двигателя. ЭБУ получает питание тремя путями: от АКБ, замка зажигания и от главного реле. С главного реле контроллер получает питание для работы и вычисляет напряжение в системе управления, и, при необходимости (в случае понижения U), увеличивает время накопления энергии в КЗ и длительность импульсов впрыска топлива (время открытого состояния клапана форсунки). Питание от АКБ поступает постоянно, даже при выключенном зажигании, это необходимо для хранения вычислений коррекций и кодов неисправностей в ОЗУ. Если в течении 2 минут напряжение бортсети ниже 10 В, то контроллер должен выдать ошибку 0562. При напряжении выше 17 В в течении менее секунды — 0563. При этих ошибках следует проверить напряжение на клеммах АКБ на ХХ при выключенных потребителях (свет, магнитола и пр.). Если напряжение в норме, то глюк контроллера, если ниже (выше) — проверить генератор.
FHO — Фактор высотной адаптации.
Это отношение нагрузки двигателя на текущей высоте к нагрузке, когда он работает на уровне моря (разумеется, при прочих равных условиях – дорога горизонтальная, скорость, температура и другие параметры те же). Параметр заложен программно в прошивке, отследить по конкретному датчику не возможно. Цилиндры наполняются воздухом в соответствии с их объёмом, а масса попавшего в них разряжённого воздуха с высотой тем меньше, чем выше вы забрались. Если ориентироваться лишь на температуру, обороты или степень открытия ДЗ, то на большой высоте форсунки будут работать, как на уровне моря – состав смеси будет всё богаче. На каждые 1000 метров дополнительной высоты FHO увеличивается на 0,1 (на 100 метров — 0,01). Если в Питере FHO = 1, то у подножья Эльбруса – около 0,8. Контроллер рассчитывает FHO только в движении. При снятии клеммы АКБ принимает фиксированное значение FHO=0,97-0,98. Например, если FHO составляет 1,01, то после снятия клеммы АКБ будет 0,97-0,98, время впрыска форсунок и мгновенный расход топлива на ХХ чуть возрастут. Это следует иметь ввиду при контроле параметров после сброса адаптаций или снятия клемм АКБ. FHO вернётся в норму только в движении.
Параметры каналов АЦП
Данная информация может быть полезной для тех, у кого есть диагностическое оборудование (сканер). Данные с каналов АЦП позволяют выявить неисправность некоторых датчиков.
2.АЦП сигнала ДТОЖ:
Напряжение зависит от температуры охлаждающей жидкости: при Т +20 гр. около 3,8 В, при Т +90 гр. напряжение ниже 0,5 В. При обрыве в цепи ДТОЖ – 5В+/-0,1 В. При замыкании сигнального провода ДТОЖ на массу – 0 В.
3. АЦП сигнала ДТВВ (установлен в ДМРВ):
Напряжение зависит от температуры воздуха на впуске:
0 гр. — 4,5-4,0В; +10 гр. – 4,0-3,75В.; +20 гр. – 3,5-3,0В; + 40 гр. – 3,0-2,5В; +50 гр.
2,5В; +60 гр. – 2,5-2,0В; +80 гр. – 1,3-1,0В; +110 гр.
0,5В.
При обрыве в цепи датчика – 5+-0,1В. При замыкании сигнального провода ДТВВ на массу – 0 В.
4. АЦП сигнала ДПДЗ:
При включенном зажигании должен быть сигнал напряжения постоянного тока, величина которого зависит от степени открытия ДЗ: при закрытой — ниже 0,7 В (0,3…0,7В), а при полностью открытой – до 5 В (4,05…4,75В).
Моменто море
В программы многих современных контроллеров (электронных блоков управления) заложена «моментная» структура управления двигателем. В зависимости от тех или иных особенностей работы на заданном режиме контроллер подбирает параметры расхода воздуха, впрыска топлива, зажигания, оптимальные для получения необходимого крутящего момента. Но сказанное не означает, что заботливый блок исправляет любые грубые ошибки водителя: пытаясь тронуться на высшей передаче или без разгона взять крутой подъем, да еще с прицепом, на «оптимизацию» не надейтесь. Если крутящий момент, развиваемый двигателем, даже при идеальных настройках меньше требуемого для движения, то никакой контроллер преодолеть препятствие не поможет. А вот умелому водителю современный контроллер — надежный союзник.
Как блок управления двигателем оперирует крутящим моментом на коленчатом валу, покажем на режиме холостого хода. Опираясь на показания датчиков системы впрыска, блок управления вычисляет угол опережения зажигания и одновременно командует регулятором холостого хода, задавая расход воздуха через байпасный канал. Данные для оптимизации работы любого двигателя — такие, как значения крутящего момента при разных нагрузках, углах опережения зажигания, температурах, а также механические потери — определены при заводских испытаниях и записаны в энергонезависимую память контроллера. Как регулируется режим работы двигателя, поясним рисунками.
Зачем понадобились коэффициенты DМжел1 и DМжел2 — нельзя ли обеспечить быстрое и точное реагирование за счет какого-нибудь одного?
Увы, нельзя. С математической точки зрения коэффициенты можно представить в виде своеобразных «регуляторов». Их задача — обеспечить минимальное отклонение реальных оборотов от желаемых. Специалистам известны пропорциональные, интегральные, дифференциальные и другие регуляторы; их устройство — отдельная тема. Скажем лишь, что если упростить механизм и оставить только пропорциональный регулятор DМжел1, то колебания оборотов будут совершаться в довольно широких пределах — такова его специфика. Современной системе управления этого мало, поэтому она дополнена интегральным регулятором. Совместно с пропорциональным он обеспечивает достаточно высокую точность поддержания оборотов — ± 40 об/мин.
На исправном двигателе значения корректирующих параметров должны быть близкими к нулю. Если они упрямо устремляются в плюс или минус, значит, системе управления приходится «напрягаться», поддерживая обороты в заданном диапазоне. Допустим, они выше желаемых — значит, результирующий момент избыточен и для его снижения коэффициенты DМжел1 и DМжел2 примут отрицательные значения.
Для примера сымитируем неисправность — снимем резиновую заглушку с ресивера двигателя. За счет подсоса воздуха обороты коленвала вырастут — но уже через несколько секунд диагностический прибор покажет, что параметры DМжел1 и DМжел2 на это отреагировали и приняли значения около —10% …-15%. В результате УОЗ снизится, байпасный канал РХХ прикроется, компенсируя излишки воздуха. Возросший было крутящий момент уменьшится — число оборотов вернется к норме.
Подсос воздуха, снижение механических потерь в двигателе, подклинивание клапана РХХ в открытом положении отклоняют параметры коррекции в минус. Повышенные механические потери или клапан РХХ, заклинивший прикрытым, отклоняют их в плюс. Зная это, уже по знаку отклонения параметра специалист может наметить пути поиска неисправности. Если двигатель исправен и прогрет до рабочей температуры, то при минимальных оборотах холостого хода значения коэффициентов обычно лежат в интервале от —3% до +3%. Предельными же считаются значения от —5% до +5%.
За параметром DМжел2 постоянно следит бортовая диагностика. Если, несмотря на все усилия контроллера, отклонения оборотов все же выйдут за пределы ±100 об/мин, бортовая диагностика зафиксирует неисправность и запишет в память блока управления код ошибки Р0506 («обороты коленвала ниже ожидаемых») либо Р0507 («. выше ожидаемых»).
Пропорциональный DМжел1 и интегральный DМжел2 коэффициенты не хранятся в памяти контроллера и перед очередным пуском двигателя равны нулю. А вот коэффициент DМжел3 хранится в энергозависимой памяти — обнулить его показания можно, сняв клемму с батареи либо с помощью диагностического прибора.
УОЗ — угол опережения зажигания по коленчатому валу. Измеряется в градусах относительно ВМТ.
nжел — желаемые обороты холостого хода (оптимальная величина, рассчитанная контроллером для данных условий работы).
nреал — фактические обороты коленчатого вала с дискретностью 40 об/мин.
РХХ — регулятор холостого хода. Текущее положение клапана РХХ измеряется в условных единицах (0–255).
DМжел1 — желаемое изменение крутящего момента двигателя для поддержания оборотов холостого хода — пропорциональная часть. Измеряется в процентах.
DМжел2 — желаемое изменение крутящего момента двигателя для поддержания оборотов холостого хода — интегральная составляющая. Измеряется в процентах.
DМжел3 — параметр адаптации регулировки холостого хода, учитывающий долговременные изменения в двигателе. Измеряется в процентах.
Dn — изменение оборотов.
Желаемое минимальное число оборотов на холостом ходу nжел контроллер выбирает в зависимости от температуры охлаждающей жидкости. Для очень многих двигателей, если они прогреты до рабочей температуры, величина nжел = 820–840 об/мин. Контроллер помнит, что это — оптимальное значение оборотов, полученное экспериментально при испытаниях двигателя. Этому состоянию соответствует некий расчетный (базовый) крутящий момент на валу — Мбаз. Для поддержания такого момента требуются определенный угол опережения зажигания УОЗ и положение клапана регулятора холостого хода. Но реальное число оборотов nреал не всегда соответствует желаемому. Заметив расхождение в оборотах, контроллер рассчитает коррекцию базового момента: УОЗ и положение клапана РХХ изменятся, но и теперь обороты коленчатого вала не совпадут точно с желаемыми! Новое расхождение тоже будет учтено — однако контроллер приблизит обороты к желаемым опять-таки за счет некоторого изменения момента. Цикл повторяется — тем самым контроллер, хотя и с небольшими колебаниями параметров, поддерживает осредненные значения оборотов и момента близкими к желаемым.
Базовый момент, как и поправочные коэффициенты, «оценивается» контроллером в процентах. Таких коэффициентов три. Первый — DМжел1 (желаемое изменение крутящего момента для поддержания оборотов холостого хода — пропорциональная часть составляющей). Это «быстродействующий» коэффициент, меняющийся скачком, как и его действие. Второй коэффициент — DМжел2 (желаемое изменение крутящего момента для поддержания оборотов холостого хода — интегральная составляющая). Этот коэффициент изменяет параметры плавно, по экспоненте. Третий коэффициент — DМжел3. Это коэффициент адаптации регулировки холостого хода. Первые два коэффициента показаны на графике. Их роль — оперативно корректировать случайные изменения оборотов коленчатого вала; третий же реагирует на факторы, долговременно сказывающиеся на работе двигателя. Например, на изменение механических потерь в двигателе в связи с его постепенным износом в ходе длительной эксплуатации. Карбюраторные двигатели из-за этого требуют периодической регулировки холостого хода. А блок управления справляется с такой задачей ничуть не хуже, причем «озабочен» ею постоянно.
Когда двигатель проработает после холодного пуска не менее 10 минут, прогреется до температуры выше 85°С и начнется лямбда-регулирование, контроллер включит режим адаптации. Теперь в работу вступает коэффициент DМжел3. До момента времени t1 компенсация отклонений оборотов происходила за счет текущих параметров коррекции DМжел1 и DМжел2 — например, к моменту включения адаптации плавно меняющийся коэффициент DМжел2 достиг —5%. На это отреагирует коэффициент DМжел3 — начнет снижаться, пока не примет значение —5%, а «оперативный» DМжел2 вернется к нулю. Схема взаимодействия этих коэффициентов та же, что и при коррекции топливоподачи (см. ЗР, 2007, № 5, 6).
Параметр адаптации регулировки холостого хода калина
Здравствуйте! Попробую описать проблему. На БК появилась ошибка 0171 "бедная смесь". Сначала сам проверил гофру на герметичность, которая идёт к дросселя. Ничего не нашёл. Поехал на диагностику. Там всё нормально показывает. Потом диагност решил, что подсос воздуха в топливной системе. Отключил адсорбер, говорит поезди пару дней, если ошибка не появится, то значит в топливной системе. Ошибка появилась . Стали замерять давление топлива. На ходу, когда газу даешь, то давление чуть меньше нормы (с его слов). Говорит меняй топливные фильтры, чисти инжектор. Заменил, хотя и делал это совсем недавно. Почистил инжектор, дроссель. Ошибка снова появилась. И теперь не знаю даже куда копать. На диагностике все датчики работают нормально, отклонений нет. Ителма М74, прошивка евро-2
Может связи нет, но менял масло в КПП в сервисе, меняли через датчик скорости. Ошибка появилась практически сразу после замены масла. Может связи и нет, а может чего открутили там. Помогите советом
Код Р0171 заносится, если:
двигатель работает;
управление топливоподачей осуществляется в режиме обратной связи по сигналу
датчика кислорода (B_LR= “Да”);
активизирована функция адаптации топливоподачи (B_LRA= “Да”);
значение параметра RKAT выходит за верхний предел допустимого диапазона (8%);
или значение параметра FRA выходит за верхний предел допустимого диапазона
(больше 1,225).
Сигнализатор неисправностей загорается через 2 драйвцикла, проверка в которых
была неудачной.
Описание проверок
Последовательность соответствует взятым в кружок цифрам на карте.
1. Анализируется диагностическая информация.
2. На работающем двигателе с помощью прибора ДСТ2М имитируются условия воз
никновения неисправности.
3. Проверяются системы и узлы, неисправность которых может привести к возник
новению кода.
4. При проведении повторной проверки №2 после устранения возможной причины
неисправности значение параметра FR не должно выходить за пределы диапазона 1±0,1.
Диагностическая информация
Неисправность непостоянного характера может быть вызвана наличием следующих
неисправностей:
Ненадежное соединение контактов колодок жгута системы зажигания, датчика
и контроллера. Осмотреть разъемы датчика и контроллера, колодки жгута на полноту и
правильность сочленения, повреждения замков, наличие поврежденных контактов и ка
чество соединения контактов с проводом.
Неправильная трасса жгута проводов. Убедиться в том, что отвод к датчику не каса
ется элементов системы выпуска отработавших газов.
Повреждения жгута. Проверить жгут на наличие повреждений. Если жгут внешне в
норме, пошевелить соответствующие колодку и жгут, одновременно наблюдая за
показаниями прибора ДСТ2М.
Ненадежное заземление контроллера. Проверить надежность присоединения прово
дов жгута системы зажигания к блоку цилиндров. Убедиться в отсутствии загрязнения
контактов.
Деградация УДК. Заменить УДК.
Евро-2 и М74 слабо совместимы.
В штатном режиме вообще никак не соместимы.
Лучше обращаться к автору прошивки Е2.
Там может быть все что угодно.
Замена датчика скорости вполне может привести к обрыву или не контакту кабеля УДК.
Там все рядом и неудобно.
Думаю дело в контактах разъемов , в соединении кабель-разъем , масса ЭБУ.
Подтянуть , перепрессовать , пропаять , зачистить все что имеет малейшее отношение к проблеме.
буду пробовать вот такие
Не знаю ,по этим ничего не скажу ,по отдельности у нас их не видел !
Купишь ,проверь через заморозку их сперва ,прежде чем ставить на авто !
Добавлено через 2 минуты
так как синие промтехпласт кончились
Мне те кто их привозил ,сказал что данная кантора слилась .
ТУТ мат мат и только мат .Ну почему как только кто-то что-то реальное начинает делать, все- тут же прикроют ,изничтожат, и ваще ,- и посадят еще не дай Бог .
Не страна ,а точно Гандурас у нас !
Добавлено через 9 минут
Евро-2 и М74 слабо совместимы.
кто такое сказал ?
Лучше обращаться к автору прошивки Е2.
Обращался. И был мягко послан. Мол прошивка вообще никак не влияет. Она только считает данные с датчиков.
Думаю дело в контактах разъемов , в соединении кабель-разъем , масса ЭБУ.
На ЭБУ кидали отдельный провод с массой. Контакты посмотрю ещё.
нет ещё, не успел - сегодня возможно получится
что-то делать с машинкой есть возможность только вечером, а холодная она только ночью и утром
Ошибка 0171 – Слишком бедная смесь в системе топливоподачи
Ошибка заносится в память ЭБУ при следующих условиях:
1. Двигатель работает.
2. Управление подачей топлива осуществляется по замкнутому циклу. Параметр B_LR= «ДА»
3. Функция адаптации подачи топлива B_LRА= «ДА».
4. Аддитивная составляющая коррекции самообучением (RKAT) вышла за верхний предел (+8%).
5. Мультипликативная составляющая коррекции самообучением (FRA) вышла за верхний предел ( > 1,22).
6. После возникновения неисправности прошло два драйв-цикла.
Причиной возникновения данной ошибки могут быть неисправность проводки, контактов датчиков и ЭБУ, отравление УДК, негерметичность впускного тракта после ДМРВ (подсос воздуха). После устранения коэффициент коррекции времени впрыска по сигналу УДК должен быть в диапазоне 0,9 – 1,1.
На мой взгляд если коэффициент коррекции времени впрыска превышает величину 1,1 то уже стоит начать поиск неисправности. Не дожидаясь когда зафиксируется ошибка.
Порядок проверки:
1. Выключаем зажигание, присоединяем сканер, включаем зажигание, проверяем наличие других ошибок и при их наличии работаем сначала по их устранению.
2. Просмотреть параметры RKAT (0,88 - 1,12) и FRA (0,95 – 1,05).
3. Произвести сброс с инициализацией. Запустить двигатель. Если коэффициент коррекции времени впрыска по сигналу УДК (FR) не превышает 1,2 то выявляем неисправность проводки, контактов датчиков и ЭБУ, отравление УДК, негерметичность впускного тракта после ДМРВ (подсос воздуха).
4. Если коэффициент коррекции времени впрыска по сигналу УДК (FR) превышает 1,2 – проверяем дроссельную заслонку на наличие повреждений, все шланги (Системы улавливания паров бензина, системы вентиляции картера, ВУТ, впускной патрубок, заглушки ресивера, топливо на наличие воды) на правильность соединения, наличие повреждений и трещин. Если неисправность обнаружена, то устранить ее повторить пункт №3.
5. Если неисправность не обнаружена – отстыковать колодку ДМРВ. Выполнить п.№3. Значение коэффициента коррекции времени впрыска должно стать в пределах 0,95 – 1,05. Если это так - заменить ДМРВ. Выполнить п. №3.
6. Если коэффициента коррекции времени впрыска не лежит в диапазоне 0,95 – 1,05 – проверить давление топлива и баланс форсунок.
7. Если давление топлива или баланс форсунок ненормативные – устранить неисправность и выполнить п. №3.
8. Если давление топлива и баланс форсунок нормативные – проверить систему выпуска на наличие утечки. Если утечки нет – заменить УДК, если утечка есть – устранить ее и выполнить п. №3.
Ошибка 0172 – Слишком богатая смесь в системе топливоподачи
Ошибка заносится в память ЭБУ при следующих условиях:
1. Двигатель работает.
2. Управление подачей топлива осуществляется по замкнутому циклу. Параметр B_LR= «ДА»
3. Функция адаптации подачи топлива B_LRА= «ДА».
4. Аддитивная составляющая коррекции самообучением (RKAT) вышла за нижний предел (- 8%).
5. Мультипликативная составляющая коррекции самообучением (FRA) вышла за верхний предел ( <0,78).
6. После возникновения неисправности прошло два драйв-цикла.
Причиной возникновения данной ошибки могут быть неисправность проводки, контактов датчиков и ЭБУ, отравление УДК. После устранения коэффициент коррекции времени впрыска по сигналу УДК должен быть в диапазоне 0,9 – 1,1.
На мой взгляд если коэффициент коррекции времени впрыска менее 0,85 то уже стоит начать поиск неисправности. Не дожидаясь когда зафиксируется ошибка.
Порядок проверки:
1. Выключаем зажигание, присоединяем сканер, включаем зажигание, проверяем наличие других ошибок и при их наличии работаем сначала по их устранению.
2. Произвести сброс и инициализацию. Запустить двигатель. По сканеру проверить величину коэффициента коррекции времени впрыска по сигналу УДК. Если он более 0,8 – проверяем исправность проводки, контактов датчиков и ЭБУ, состояние УДК.
3. Если коэффициент коррекции времени впрыска по сигналу УДК менее 0,8 – заглушить двигатель. Проверить гофру впускного тракта, воздушный фильтр на наличие загрязнений и посторонних предметов, препятствующих проходу воздуха.
4. Если при осмотре препятствия проходу воздуха обнаружены – повторить п.№2
5. Если ничего не обнаружено – запустить двигатель, при помощи сканера проверить обороты ХХ (790-890 об/мин), массовый расход воздуха (7,5-12 кг/час), положение РХХ (25-45 шагов), параметр нагрузки двигателя (14-23 %), желаемое изменение момента для поддержания ХХ (от -3% до +3%), коэффициент коррекции времени впрыска по сигналу УДК (0,85-1,15), параметр адаптации регулировки ХХ (от -2% до +2%). Если обнаружены отклонения от указанных величин – проверить работоспособность РХХ (смотри ниже). Если отклонений нет – отстыковать колодку жгута проводки от ДМРВ и повторить п.№2. Величина коэффициента коррекции времени впрыска по сигналу УДК должна быть 0,95 – 1,05.
6. Если это так – заменить ДМРВ и повторить п. №2, если нет – проверить давление топлива и баланс форсунок. Если выявлена неисправность – устранить и повторить п.№2.
7. Если неисправность не выявлена – заменить УДК и повторить п.№2.
Необходимо заметить что на ВАЗ-2170 УДК и ДДК – одинаковые, поэтому прежде чем принимать решение о замене ДК целесообразно поменять их местами и через некоторое время проверить наличие ошибок. Если ошибка перешла на ДДК тогда неисправен датчик.
Датчик холостого хода автомобиля Лада Калина
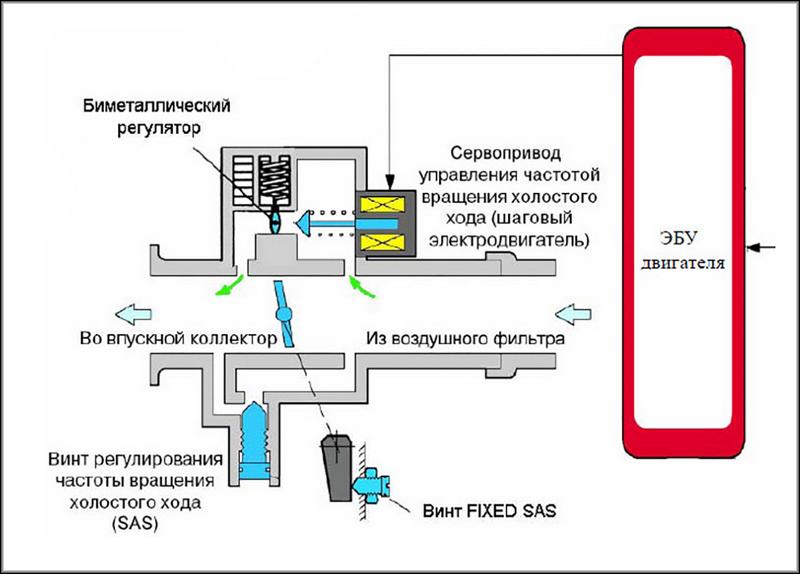
В машинах с распределенным впрыском, к которым относится и Лада Калина, ставят регулятор холостого хода — специальное электронное устройство — шаговый электродвигатель, управляемый ЭБУ.
Датчик холостого хода Калина представляет собой электромотор с конусной иглой. Она перекрывает подачу воздушного потока. Обычно прибор исправно работает, позволяя силовой установке быстро выходить на рабочий температурный режим. Однако если с прибором случается неприятность, симптомом становится сбой в холостых оборотах и ошибки в работе двигателя.

Датчик холостого хода Лада Калина: функционал
Главное назначение регулятора холостого хода Лада Калина — измерение параметров системы впуска и соответствующая регулировка оборотов. Импульсы направляются к электронному блоку управления, и происходит корректировка объема топливно-воздушной смеси.
Принцип работы устройства сводится к своевременному открытию или, наоборот, перекрытию канала, идущего в обход дроссельной заслонки. Когда начинает работать силовой агрегат, датчик коленвала передает на контролер данные об оборотах, ЭБУ согласно заданным алгоритмам рассчитывает, какое необходимо действие — открытие или закрытие — и передает сигнал на РХХ. Конусная игла (шток) перекрывает или открывает канал, тем самым провоцируя увеличение или уменьшение подачи топливно-воздушной смеси.
Прибор позволяет контролировать объем подаваемого в камеру сгорания воздуха. Воздушный поток идет через дроссельную заслонку по впускному тракту. На холостом ходу заслонка закрыта.
РХХ участвует в прогреве силового агрегата на 8 или 16 клапанов, гарантируя достижения нужной для стабильной работы температуры. При включении зажигания шток входит в специальное отверстие — датчик занимает первоначальное положение.
Функции датчика холостого хода на Калине:
- позволяет определить объем воздуха;
- обеспечивает надлежащий прогрев двигателя;
- определяет и корректирует количество оборотов.
Где находится РХХ — на корпусе дроссельного узла, немного ниже, чем расположен датчик положения дроссельной заслонки. Прибор вставлен в байпасный канал.

Диагностика неисправностей
В автомобилях модели Лада Калина нет функции самодиагностики, потому далеко не всегда получается сразу распознать, когда РХХ выходит из строя. Несмотря на то, что сбои в работе данной системы возникают редко, такое все же случается, и автолюбителю важно вовремя обратить внимание на соответствующую симптоматику:
- двигатель запускается с трудом или не запускается совсем. Нужно зажать педаль газа или проводить дросселирование;
- после запуска мотор глохнет, так как шток регулятора не устанавливается в рабочее положение и не пропускает необходимый объем воздуха;
- наблюдается троение, тряска;
- когда КПП в нейтральном положении, обороты силовой установки «плавают» — резко возрастают и вновь опускаются до минимума;
- при движении наблюдаются рывки или подергивания;
- переключение передач может вызвать внезапную остановку мотора — машина глохнет;
- прогревая двигатель во время холодов, водитель замечает, что обороты не увеличиваются выше 1500 в минуту, прогрев замедляется.

Иногда обороты снижаются, если включается компрессор климатической системы, может остановиться силовой агрегат, а на приборной панели появится индикация, что не все в порядке с системой смазки.
Чаще всего встречается неустойчивость оборотов. Если автомобиль преодолел рубеж в 50 тыс. км и были замечены подобные симптомы, требуется провесить чистку полости дроссельного узла. После процедуры производится замена датчика холостого хода Калина.
Ремонту РХХ не подлежит.
Замена датчика на ВАЗ
Выполнить демонтаж и установить новый прибор не так уж сложно, главное, точно определить, где он располагается.
Чтобы снять, понадобится выполнить следующие действия:
- демонтировать экран двигателя и отключить разъемы кабелей на дроссельном блоке и регуляторе;
- слить антифриз и отключить патрубки обогрева;
- с помощью крестообразной отвертки открутить крепления и снять устройство;
- отключить патрубок от системы вентиляции картера, ослабив хомуты и сдвинув их в сторону;
- провести аналогичную операцию с патрубками, по которым подводится хладагент, и с продувками абсорбера;
- открутить крепления и снять дроссельный блок.
Необходимо внимательно изучить прокладку, если на ней есть повреждения, требуется ее сменить, чтобы в систему впуска не попадал нежелательный воздух.
Демонтированный датчик стоит осмотреть. Если шток (игла) выходит из корпуса на 2.3 см, то прибор работоспособен. Измерения рекомендуется проводить штангенциркулем. Если на РХХ заметен нагар, но механических повреждений нет, то он требует промывки очистителем для карбюратора. После высыхания он будет полностью функционален.
Установка нового датчика выполняется аналогичным образом в обратном порядке.
Проверка устройства
Чтобы уточнить, насколько прибор работоспособен, выполняют диагностику:
- демонтируют прибор, подключают контактную колодку питания и запускают силовой агрегат. Если устройство исправно, шток выдвигается, в противном случае следует устанавливать новое;
- допустима проверка вольтметром. Отключив прибор от контактной фишки, проверяют параметры сопротивления. Оптимальное — около 50 Ом. Напряжение — 12 В. Если напряжение меньше, есть проблемы в работе электрической цепи;
- проверка сопротивлений внутренней и внешних обмоток устройства с помощью мультиметра также подскажет, исправно ли оно. Параметры контактов должны лежать в диапазоне от 40 до 80 Ом.

Датчики холостого хода на Ладу Калину производятся разными компаниями, но взаимозаменяемы и не слишком отличаются по качеству. Это недорогая деталь, при неисправности которой требуется сразу же проводить замену.
Читайте также: