
Схема частотного преобразователя mitsubishi
Обновлено: 05.07.2024
Частотный привод 5-200 Гц (10-400 Гц)
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса :
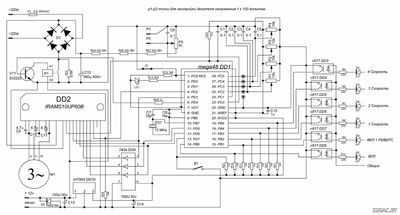
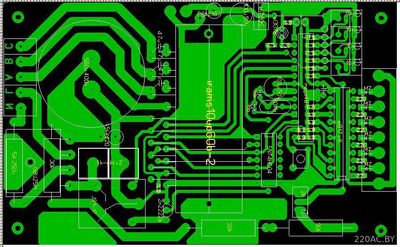
Проект в layout
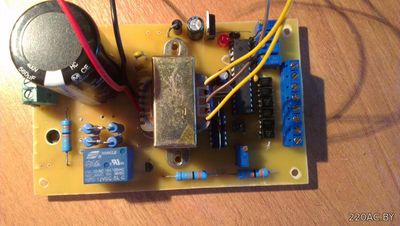
Ниже фото того, что у меня получилось
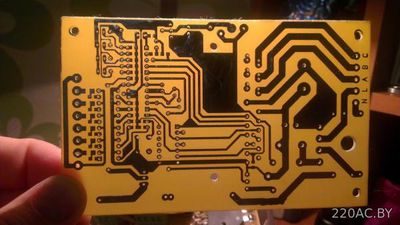
Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа).
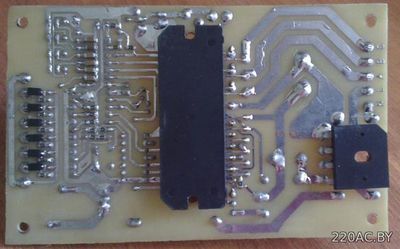
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220 В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220 в 50 Гц). Скорость набора частоты установлена на уровне 15 Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 "штырь". на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100 Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200 Гц., 1v-40 Гц, 1.25v-50 Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки масштабирования напряжения DC звена 1 в -100 в (на схеме R30).

Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО. На этом настройка завершена.
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет "заводские " настройки, которые подходят как для двигателя с напряжением 220 В и частотой 50 Гц), так и для двигателя с напряжением 380 в и частотой 50 гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить "заводские " настройки для двигателя (220 в 50 Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того . светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220 В - 50 Гц
- Вольт добавка (напряжение намагничивания, торможения ) - 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220 В- 30 Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200 Гц /220 то резистор нужно выкрутить на максимум; если написано 100 Гц/ 220 в нужно добиться 2.5 Вольта на 1-ом контакте. (1 Вольт на первом контакте соответствует 40 Гц); если на двигателе написано 50 Гц/400 В то нужно выставить 27 Гц/0,68 В (например:(50/400)*220=27 Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25 Гц - 200 Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5 Гц/сек - 50 Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5 Гц/сек - 50 Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать. Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220 в 50 Гц с вольт добавкой в 10 % .
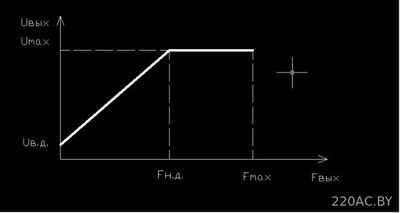
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220 В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50 Гц , номинальное напряжение 80 В, Чтобы узнать какая будет номинальная частота при 220 В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137 Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50 Гц одной фазы (на 3-х фазах зависает комп )
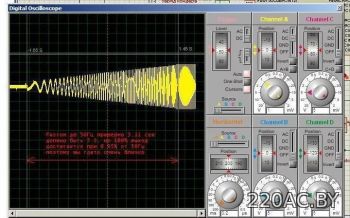
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50 Гц 220 В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 кВт.
Главное у данного модуля: ток короткого замыкания 140 А против 47 А, защита настроена на уровне 25 А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000 мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет "хана". Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10 мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20 МГц, то привод получится 10-400 Гц; темп разгона 10-100 Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380 В 50 Гц, а настройки для 220 В 50 Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
Долой конденсаторы и расщепители фаз! Частотный преобразователь за 1 тыс руб.
До сих пор читаю иногда статьи, где авторы рассказывают про конденсаторы и расщепители для того что б запустить 3-х фазный мотор от однофазной сети.
1) Пусковые конденсаторы - классика. К одной из обмоток подключаются пусковые конденсаторы и мотор запускается со стартовой кнопки, подключающей эти конденсатор к обмоткам.
Минусы - огромные пусковые токи и чем мощнее мотор, тем они больше. Обычно, разумное ограничение для бытовой сети 1.5-2КВт. Но есть люди, запускающие и 5 и даже 10Квт, когда пусковые токи достигают 100+ ампер!
2) Второе решение - расщепитель фаз . Это когда один трёхфазный мотор запускается от конденсаторов и раскручивает маховик, а все ведомые моторы подключаются к его обмоткам, от которых поступает уже "3х фазное" напряжение. В кавычках оно потому, что фаз хоть и 3, но углы между ними не 120 градусов. Впрочем, это работает.
Минусы же - нужен второй мотор, который тоже будет потреблять электроэнергию для своей работы. Ну и его надо тоже запускать, для чего опять-таки требуется конденсаторный старт.
Так же есть варианты с электронными пусковыми конденсаторами. Но сути это не меняет.
3) Частотный преобразователь (частотник)
Однако, настал 21-й век и развитие электроники привело к тому, что сейчас лучше и даже проще создать преобразователь частоты, питаемый от однофазной сети, но позволяющий мало того что получить нормальные 3 фазы для мотора, но так же обеспечить плавный пуск и даже ускоренную остановку мотора. Не говоря о таких приятных мелочах как регулировка оборотов и возможность реверса одной кнопкой.
И сейчас многие "бывалые" скажут как это сложно и дорого. Но будут иметь ввиду своих промышленных монстров, но для бытового применения всё НАМНОГО проще и дешевле.
Если у вас типовой "домашний" мотор мощностью меньше 3х КВт то всё может быть весьма просто и бюджетно. И есть 2 варианта
1) - Типовой китайский частотный преобразователь с Алиэкспресса. Цена вопроса
3000 руб за 750-и ваттную версию, или
4.5 тыс руб за 2.2КВт. В настройке практически не нуждаются - достаточно подключить провода, выкрутить регулятор оборотов на 50Гц и нажать пуск. Максимум что может потребоваться типовому пользователю - настроить скорость разгона и остановки мотора.
Скалярный частотник для однофазного асинхронного двигателя
Начнём с того, что у каждого программера должен быть токарный станок. Ну… Или, как минимум, у меня он должен быть. И пусть даже без ЧПУ. Это моя мечта.
И мечта сбылась. Станок куплен, привезён, поставлен на место парковки и… Надо бы его включить. А включить его не так и просто. И если не искать простых путей, то нужен «частотник», а по-научному: преобразователь частоты. И пусть я в этом профан, но я его сделал.
И вот с подключения двигателя и начинаются интересности. Сам по себе я в таком профан, есть некоторые общие знания, но как оно реально работает — понятия не имел. А уж когда вместо ожидаемых 3-х выводов 3-х фазника я узрел 4, да ещё и не 3 обмотки с общей точкой, а отдельные 2, да ещё с разным сопротивлением… Ну, я, кхм, скажем так — «удивился».
Так вот, двигатели. Они бывают трёхфазные, трёхфазные, включенные треугольником через конденсаторы и… однофазные конденсаторные.
Трёхфазные — «полноценные» асинхронники. 3 обмотки, по-хорошему включённые звездой и повешенные на полноценные 3 фазы. Ну, или 3-х фазный частотник, коих валом на али.
Трёхфазные + треугольник + конденсаторы. Тут мы уже теряем в КПД, мощности и моменте, ну да если 3-х фаз нету, то вполне себе решение. Дёшево, просто, надёжно, сердито.
Однофазные конденсаторные
Вот о них то и пойдёт речь. Вообще, такие двигатели очень распространены. Это и вентиляторы моторчиков проекторов и приводы некоторых часов, и моторчики для маленьких наждаков и остальные применения, где не надо большой мощности, но нужны плюсы асинхронников: огромная надёжность + обороты, зависящие только от частоты питающего напряжения.
Базовая схема включения (картинка не моя, честно найденная на просторах интернета):
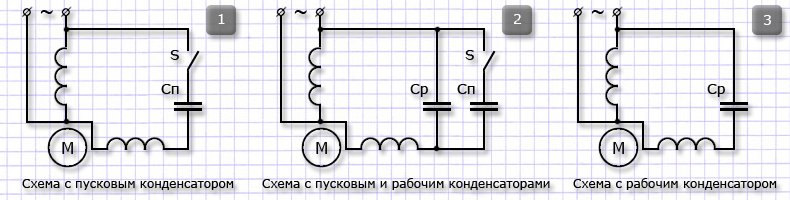
В общем, грубо, принцип такой: Есть стартерная обмотка, она наводит ЭДС в короткозамкнутом роторе. Со смещением по фазе включается рабочая обмотка. Она «отталкивает» замагниченный якорь, начинается вращение. При повороте на некий угол, всё повторяется. Мотор начинает крутиться.
Итого — нужно 2 фазы, смещённые на некий угол. Обычно это 90 градусов. Это и обеспечивается пусковым конденсатором. Ну а после набора оборотов — якорь начинает работать от самой же рабочей обмотки и стартерную обмотку можно вообще даже отключить. Ну, или запитать от рабочего конденсатора, существенно меньшей ёмкости.
Но это всё теория. А на практике то чего хочется? Хочется частотник. Что б само разгонялось, тормозило, крутилось в обе стороны, ну и с разными оборотами, конечно! И вот тут становится всё несколько сложнее. Дело в том, что таких частотников в продаже в разы меньше. И стоят они в разы больше. В общем — экзотика.
А ведь, если так задуматься, то разница от 3-х фазного не так и велика. И даже можно использовать ту же схемотехнику. При этом, есть те же 3 отвода: общий, стартерная обмотка, рабочая обмотка. И всё дело в прошивке. А значит — это можно сделать. И пусть это будет не векторное управление с кучей математики, а простое скалярное, но… как умею.
Итак — что требуется. Для начала посмотрим на графики синуса и косинуса (у нас же смещение 90 градусов) УСЛОВНО оно будет выглядеть так:
Т.е. задача элементарна: «притягиваем» к земле общий, подаём пачку положительных импульсов в стартерную обмотку, подаём пачку импульсов в рабочую. Затем подтягиваем общий к плюсу и подаём пачку отрицательных импульсов к стартерной, а затем и рабочей обмотке. Т.о. грубо получаем имитацию смены полярности и сдвиг фаз. От того, как часто мы это будем делать — будет зависеть «частота».
В общем — теория проста. В качестве контроллера ATMega 328 с бутлоадером ардуины (да по сути, сама ардуина, просто без лишней обвязки), в качестве драйвера IR2132 (старая, но с IR2136 не сложилось) и выходные ключи IRG4BC30. Дя моего 1.1КВт-го мотора этого более чем достаточно.
(Если повторять схему, то просто делается плата, в Arduino Duemilanove заливается скетч, затем Mega328 выдёргивается и впаивается в плату. Готово.)
А вот дальше… Дальше я погрузился в удивительный мир индуктивностей и силовой электроники. И всё оказалось не так и просто, как думалось вначале:
1. Скорость открытия и закрытия ключей — это важно. Deadtime — это ОЧЕНЬ важно.
2. Включение балласта — обязательно с использованием диода, обращённого плюсом на силовой фильтрующий конденсатор. Иначе выбросы при снятии нагрузки с индуктивности на раз выводят из строя силовые IGBT.
3. Охлаждение. На плате маленькие радиаторы — плохо. Либо перегреется, либо надо обдувать. Но если обдувать, то вся металлическая взвесь от станка, рано или поздно, закоротит что-то и будет бах.
3+. Слюда, а точнее ОЧЕНЬ ТОНКАЯ слюда, это плохо. Она пробивается и получается то, что в заглавии статьи. В то же время силиконовые термопрокладки хуже по теплопроводности. Ну а керамика… У меня её нет.
4. Торможение методом длинной пачки импульсов одной полярности на одну обмотку, быстро перегревает транзисторы и они сгорают. А так же, очень весело прыгает мотор, раскрученный до 3-х тыс оборотов и остановленный за 0.3 сек до 0.
5. Когда у вас всё заработает и вы расслабитесь, включите схему без балласта и нажмёте пуск — будет бах. Это приводит ещё и к замене драйвера.
Скетч: Сейчас реализовано вращение в обе стороны с плавной перестройкой частоты 25-75Гц с шагом 0.25. Была идея с тормозом. Сейчас закомментировано и надо будет менять схему. А именно, идея такая: я правильно подавал импульсы одной полярности, НО. Это надо делать через балластное сопротивление отдельным ключом.
Силовая часть: схема ещё будет дорабатываться, но на данный момент станок стоит в не отапливаемом помещении и работать с ним крайне сложно из-за замерзания масла.
Схема: 
В общем-то почти классик, но собранная из 5-и разных схем. Диоды по «высоким» плечам в общем-то при применении IGBT транзисторов и не обязательны, но я сначала сделал, а потом только подумал
В итоге: оно работает. Многое ещё стоит доделать, например выносной «пультик», тормоз. Может стоит поэкспериментировать с длительностью импульсов или сделать таки полноценный ШИМ имитирующий синус, а не постоянную скважность. Но пока это так. Может кому пригодится.
И в окончание, хотелось бы спросить: вместо балласта я поставил дроссель, «зажатый» диодами. На сколько я не прав в таком решении? Дроссель, я даже не знаю какой индуктивности. Взят из БП ATX, где он стоял в блоке компенсации реактивной мощности.
Ну а опыт… Опыт очень интересный. Я никогда б не подумал что это может быть столь сложно. И что 30В и 300В это огромная разница. Очень зауважал людей, которые такие вещи проектируют.
А это цена моих ошибок:
Видео всего процесса можно посмотреть тут: 1 2 3
Вопросы более знающим, ответы хотелось бы в комментариях:
1. Дроссель что стоит по цепи +310. Стоит ли мне от него избавляться? Я поставил его в надежде что нарастание тока, в случае сквозного тока, будет медленней и драйвер успеет уйти в защиту по току.
2. У меня получаются импульсы одинаковой скважности. Критически ли это важно? Оставить, или всё ж таки делать нечто «синусозависимое» по скважности?
Частотный преобразователь
Согласно ГОСТ 23414-84 полупроводниковый преобразователь частоты - полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты
Частотный преобразователь - это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Обычно частотный преобразователь способен управлять скоростью и моментом асинхронных и/или синхронных двигателей.


Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи.
На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
-
Современные электроприводы должны отвечать различным требованиям таким как:
- максимальный КПД;
- широкий диапазон плавной установки скорости вращения, момента, ускорения, угла и линейного положения;
- быстрое удаление ошибок при изменении управляющих сигналов и/или помех;
- максимальное использование мощности двигателя во время сниженного напряжения или тока;
- надежность, интуитивное управление.
Конструкция частотного преобразователя
Основными элементами частотного преобразователя являются силовая часть (преобразователь электрической энергии) и управляющее устройство (контроллер). Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.


Методы управления
Инвертор напряжения
Инвертор напряжения наиболее распространен среди силовых преобразователей.
Двухуровневый инвертор напряжения
Двухуровневый инвертор напряжения (two-level voltage-source inverter) – наиболее широко применяемая топология преобразователя энергии. Он состоит из конденсатора и двух силовых полупроводниковых ключей на фазу. Управляющий сигнал для верхнего и нижнего силовых ключей связан и генерирует только два возможных состояния выходного напряжения (нагрузка соединяется с положительной или отрицательной шиной источника постоянного напряжения).

Используя методы модуляции для генерирования управляющих импульсов возможно синтезировать выходное напряжение с желаемыми параметрами (формой, частотой, амплитудой). Из-за содержания высоких гармоник в выходном сигнале для генерирования синусоидальных токов выходной сигнал необходимо фильтровать, но так как данные преобразователи обычно имеют индуктивную нагрузку (электродвигатели) дополнительные фильтры используются только при необходимости.
Максимальное выходное напряжение определяется значением постоянного напряжения звена постоянного тока. Для эффективного управления мощной нагрузкой требуется высокое постоянное напряжение звена постоянного тока, но на практике это напряжение ограничено максимальным рабочим напряжением полупроводников. Для примера низковольтные IGBT транзисторы обеспечивают выходное напряжение до 690 В. Для того чтобы обойти данное ограничение по напряжению в последние десятилетия были разработаны схемы многоуровневых преобразователей. Данные преобразователи сложнее, чем двухуровневые в плане топологии, модуляции и управления, но при этом имеют лучшие показатели по мощности, надежности, габаритам, производительности и эффективности.
Трехуровневый преобразователь с фиксированной нейтральной точкой
В трехуровневом преобразователе с фиксированной нейтральной точкой (three-level neutral point clamped converter) постоянное напряжение делится поровну посредством двух конденсаторов, поэтому фаза может быть подключена к линии положительного напряжения (посредством включения двух верхних ключей), к средней точке (посредством включения двух центральных ключей) или к линии отрицательного напряжения (посредством включения двух нижних ключей). Каждому ключу в данном случае требуется блокировать только половину напряжения звена постоянного тока, тем самым позволяя увеличить мощность устройства, используя те же самые полупроводниковые ключи, как и в обычном двухуровневом преобразователе. В данном преобразователе обычно используются высоковольтные IGBT транзисторы и IGCT тиристоры.

-
Недостатками данных преобразователей являются:
- Дисбаланс конденсаторов, создающий асимметрию в преобразователе. Данную проблему предлагается решать путем изменения метода модуляции.
- Неравное распределение потерь из-за того, что потери на переключение внешних и центральных ключей отличаются в зависимости от режима работы. Данная проблема не может быть решена с использованием обычной схемы, поэтому была предложена измененная топология – активный преобразователь со связанной нейтральной точкой (active NPC). В этой схеме диоды заменены управляемыми ключами. Таким образом, выбирая соответствующую комбинацию ключей, возможно уменьшить и равномерно распределить потери.
Преобразователь с фиксированной нейтральной точкой может масштабироваться для достижения больше чем трех уровней выходного сигнала путем деления напряжения звена постоянного тока более чем на два значения посредством конденсаторов. Каждое из этих деленных напряжений может быть подключено к нагрузке с использованием расширенного набора ключей и ограничительных диодов. Вместе с увеличением мощности преимуществами многоуровневого преобразователя является лучшее качество электроэнергии, меньшее значение скорости нарастания напряжения (dv/dt) и связанных электромагнитных помех. Однако, когда преобразователь со связанной нейтральной точкой имеет более трех уровней, появляются другие проблемы. С точки зрения схемотехники в таком случае ограничительные диоды требуют более высокое максимальное рабочее напряжение чем основные ключи, что требует использования различных технологий или нескольких ограничительных диодов соединенных последовательно. В дополнение становится критическим неравномерное использование силовых элементов в схеме. В итоге из-за увеличения количества элементов снижается надежность. Приведенные недостатки ограничивают использование преобразователей с фиксированной нейтральной точкой с более чем тремя уровнями в промышленных приложениях.
Многоуровневые преобразователи
Каскадные преобразователи основанные на модульных силовых ячейках со схемой H-мост (cascaded H-bridge - CHB) и преобразователи с плавающими конденсаторами (flying capacitor converter) были предложены для обеспечения большего количества уровней выходного напряжения в сравнении с преобразователями с фиксированной нейтральной точкой.
Каскадный Н-мостовой преобразователь
Каскадный преобразователь - высоко модульный преобразователь, состоящий из нескольких однофазных инверторов, обычно называемыми силовыми ячейками, соединенными последовательно для формирования фазы. Каждая силовая ячейка выполнена на стандартных низковольтных компонентах, что обеспечивает их легкую и дешевую замену в случае выхода из строя.

Основным преимуществом данного преобразователя является использование только низковольтных компонентов, при этом он дает возможность управлять мощной нагрузкой среднего диапазона напряжения. Несмотря на то что частота коммутации в каждой ячейке низкая, эквивалентная частота коммутации приложенная к нагрузке – высокая, что уменьшает потери на переключение ключей, дает низкую скорость нарастания напряжения (dv/dt) и помогает избежать резонансов.
Преобразователь с плавающими конденсаторами
Выходное напряжение преобразователя с плавающими конденсаторами получается путем прямого соединения выхода фазы с положительной, отрицательной шиной или подключением через конденсаторы. Количество уровней выходных напряжений зависит от количества навесных конденсаторов и отношения между различными напряжениями.

Этот преобразователь, как и в случае каскадного преобразователя, также имеет модульную топологию, где каждая ячейка состоит из конденсатора и двух связанных ключей. Однако, в отличие от каскадного преобразователя добавление дополнительных силовых ключей к конденсаторному преобразователю не увеличивает номинальную мощность преобразователя, а только уменьшает скорость нарастания напряжения (dv/dt), улучшая коэффициент гармоник выходного сигнала. Как и у каскадного преобразователя, модульность уменьшает стоимость замены элементов, облегчает поддержку и позволяет реализовать отказоустойчивую работу.
Конденсаторный преобразователь требует только один источник постоянного тока для питания всех ячеек и фаз. Поэтому, можно обойтись без входного трансформатора, а количество ячеек может быть произвольно увеличено в зависимости от требуемой выходной мощности. Подобно преобразователю с фиксированной нейтральной точкой, этому преобразователю требуется специальный алгоритм управления для регулирования напряжения на конденсаторах.
Инвертор тока
Для работы инвертору тока всегда требуется управляемый выпрямитель, чтобы обеспечить постоянный ток в звене постоянного тока. В стандартной топологии обычно используются тиристорные выпрямители. Чтобы уменьшить помехи в нагрузке, в звене постоянного тока используется расщепленная индуктивность. Инвертор тока имеет схему силовых ключей наподобие инвертора напряжения, но в качестве силовых ключей используются тиристоры с интегрированным управлением (IGCT). Выходной ток имеет форму ШИМ и не может быть напрямую приложен к индуктивной нагрузке (электродвигателю), поэтому инвертор тока обязательно включает выходной емкостной фильтр, который сглаживает ток и выдает гладкое напряжение на нагрузку. Этот преобразователь может быть реализован для работы на средних напряжениях и более того он по природе имеет возможность рекуперации энергии.

Прямые преобразователи
Прямые преобразователи передают энергию прямо от входа к выходу без использования элементов накопления энергии. Основным преимуществом таких преобразователей является меньшие габариты. Недостатком – необходимость более сложной схемы управления.

Матричный преобразователь в его прямой и непрямой версии также принадлежит к категории прямых преобразователей. Основной принцип работы прямого матричного преобразователя (direct matrix converter) - возможность соединения выходной фазы к любому из входных напряжений. Преобразователь состоит из девяти двунаправленных ключей, которые могут соединить любую входную фазу с любой выходной фазой, позволяя току течь в обоих направлениях. Для улучшения входного тока требуется индуктивно-емкостной фильтр второго порядка. Выход напрямую соединяется с индуктивной нагрузкой. Не все доступные комбинации ключей возможны, они ограничены только 27 правильными состояниями коммутации. Как говорилось ранее, основное преимущество матричных преобразователей - меньшие габариты, что важно для автомобильных и авиационных приложений.

Непрямой матричный преобразователь (indirect matrix converter) состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора. Количество силовых полупроводников такое же как у прямых матричных преобразователей (если двунаправленный ключ рассматривается как два однонаправленных ключа), но количество возможных состояний включения отличается. Используя ту же самую конфигурацию непрямого матричного преобразователя, возможно упростить его топологию и уменьшить количество элементов ограничив его работу от положительного напряжения в виртуальном звене постоянного тока. Уменьшенная топология называется разреженный матричный преобразователь (sparse matrix converter).
Схемы любительских частотных преобразователей

Одна из первых схем преобразователя для питания трехфазного двигателя была опубликована в журнале «Радио» №11 1999г. Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке.
Преобразователь предназначался для питания миниатюрного трехфазного двигателя ДИД-5ТА, который использовался в станке для сверления печатных плат. При этом следует отметить, что рабочая частота этого двигателя 400Гц, а напряжение питания 27В. Кроме того, средняя точка двигателя (при соединении обмоток «звездой») выведена наружу, что позволило предельно упростить схему: понадобилось всего три выходных сигнала, а на каждую фазу потребовался всего один выходной ключ. Схема генератора показана на рисунке 1.
Как видно из схемы преобразователь состоит из трех частей: генератора-формирователя импульсов трехфазной последовательности на микросхемах DD1…DD3, трех ключей на составных транзисторах (VT1…VT6) и собственно электродвигателя M1.
На рисунке 2 показаны временные диаграммы импульсов, сформированных генератором-формирователем. Задающий генератор выполнен на микросхеме DD1. С помощью резистора R2 можно установить требуемую частоту вращения двигателя, а также изменять ее в некоторых пределах. Более подробную информацию о схеме можно узнать в указанном выше журнале. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами.
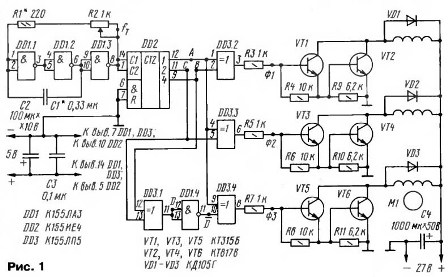
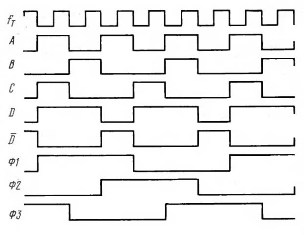
Рисунок 2. Временные диаграммы импульсов генератора.
На базе рассмотренного контроллера А. Дубровским из г. Новополоцка Витебской обл. была разработана конструкция частотно-регулируемого привода для двигателя с питанием от сети переменного тока напряжением 220В. Схема устройства была опубликована в журнале «Радио» 2001г. №4.
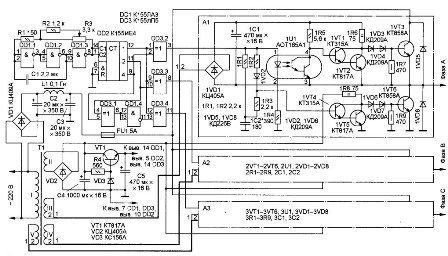
В этой схеме, практически без изменений, используется только что рассмотренный контроллер по схеме М. Мухина. Выходные сигналы с элементов DD3.2, DD3.3 и DD3.4 используются для управления выходными ключами A1, A2, и A3, к которым подключается электродвигатель. На схеме полностью показан ключ A1, остальные идентичны. Полностью схема устройства показана на рисунке 3.
Подключение двигателя к выходу трехфазного инвертора
Для ознакомления с подключением двигателя к выходным ключам стоит рассмотреть упрощенную схему, приведенную на рисунке 4.
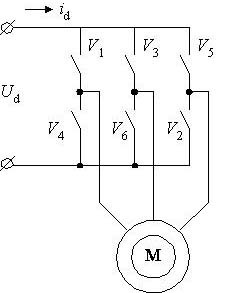
На рисунке показан электродвигатель M, управляемый ключами V1…V6. Полупроводниковые элементы для упрощения схемы показаны в виде механических контактов. Питание электродвигателя осуществляется постоянным напряжением Ud получаемым от выпрямителя (на рисунке не показан). При этом, ключи V1, V3, V5 называются верхними, а ключи V2, V4, V6 нижними.
Совершенно очевидно, что открытие одновременно верхних и нижних ключей, а именно парами V1&V6, V3&V6, V5&V2 совершенно недопустимо: произойдет короткое замыкание. Поэтому, для нормальной работы такой ключевой схемы, обязательно, чтобы к моменту открытия нижнего ключа верхний ключ уже был закрыт. С этой целью контроллеры управления формируют паузу, часто называемую «мертвой зоной».
Величина этой паузы такова, чтобы обеспечить гарантированное закрытие силовых транзисторов. Если эта пауза будет недостаточна, то возможно кратковременное открытие верхнего и нижнего ключа одновременно. Это вызывает нагрев выходных транзисторов, часто приводящий к выходу их из строя. Такую ситуацию называют сквозными токами.
Вернемся к схеме, показанной на рисунке 3. В данном случае верхними ключами являются транзисторы 1VT3, а нижними 1VT6. Нетрудно заметить, что нижние ключи гальванически связаны с управляющим устройством и межу собой. Поэтому управляющий сигнал с выхода 3 элемента DD3.2 через резисторы 1R1 и 1R3 подаются непосредственно на базу составного транзистора 1VT4…1VT5. Этот составной транзистор есть не что иное, как драйвер нижнего ключа. В точности также от элементов DD3, DD4 управляются составные транзисторы драйверов нижнего ключа каналов A2 и A3. Питание всех трех каналов осуществляется от одного и того же выпрямителя на диодном мосте VD2.
Верхние же ключи гальванической связи с общим проводом и управляющим устройством не имеют, поэтому для управления ими кроме драйвера на составном транзисторе 1VT1…1VT2 пришлось в каждый канал установить дополнительный оптрон 1U1. Выходной транзистор оптрона в этой схеме также выполняет функцию дополнительного инвертора: когда на выходе 3 элемента DD3.2 высокий уровень открыт транзистор верхнего ключа 1VT3.
Для питания каждого драйвера верхнего ключа используется отдельный выпрямитель 1VD1, 1C1. Каждый выпрямитель питается от индивидуальной обмотки трансформатора, что можно рассматривать как недостаток схемы.
Конденсатор 1C2 обеспечивает задержку переключения ключей около 100 микросекунд, столько же дает оптрон 1U1, тем самым формируется вышеупомянутая «мертвая зона».
Достаточно ли только регулирования частоты?
С понижением частоты питающего переменного напряжения падает индуктивное сопротивление обмоток двигателя (достаточно вспомнить формулу индуктивного сопротивления), что приводит к увеличению тока через обмотки, и, как следствие, к перегреву обмоток. Также происходит насыщение магнитопровода статора. Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя.
Одним из способов решения проблемы в любительских частотниках предлагалось это самое эффективное значение регулировать при помощи ЛАТРа, подвижный контакт которого имел механическую связь с переменным резистором регулятора частоты. Такой способ был рекомендован в статье С. Калугина «Доработка регулятора частоты вращения трехфазных асинхронных двигателей». Журнал «Радио» 2002, №3, стр.31.
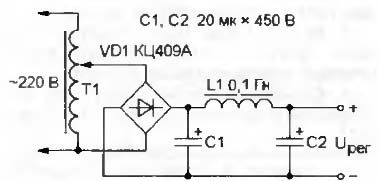
В любительских условиях механический узел получался в изготовлении сложным, а главное ненадежным. Более простой и надежный способ использования автотрансформатора был предложен Э. Мурадханяном из Еревана в журнале «Радио» №12 2004. Схема этого устройства показана на рисунках 5 и 6.
Напряжение сети 220В подается на автотрансформатор T1, а с его подвижного контакта на выпрямительный мост VD1 с фильтром C1, L1, C2. На выходе фильтра получается изменяемое постоянное напряжение Uрег, используемое собственно для питания двигателя.
Напряжение Uрег через резистор R1 также подается на задающий генератор DA1, выполненный на микросхеме КР1006ВИ1 (импортный вариант NE555). В результате такого подключения обычный генератор прямоугольных импульсов превращается в ГУН (генератор, управляемый напряжением). Поэтому, при увеличении напряжения Uрег увеличивается и частота генератора DA1, что приводит к увеличению частоты вращения двигателя. При снижении напряжения Uрег пропорционально уменьшается и частота задающего генератора, что позволяет избежать перегрев обмоток и перенасыщение магнитопровода статора.
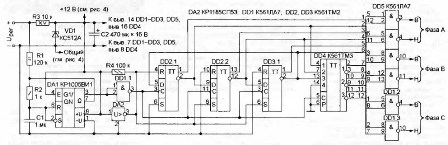
В той же журнальной статье автор предлагает вариант задающего генератора, который позволяет избавиться от использования автотрансформатора. Схема генератора показана на рисунке 7.
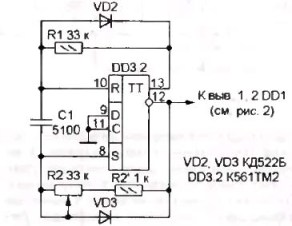
Генератор выполнен на втором триггере микросхемы DD3, на схеме обозначен как DD3.2. Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Вместе с регулировкой частоты изменяется и длительность импульса на выходе генератора: при понижении частоты длительность уменьшается, поэтому напряжение на обмотках двигателя падает. Такой принцип управления называется широтно импульсной модуляцией (ШИМ).
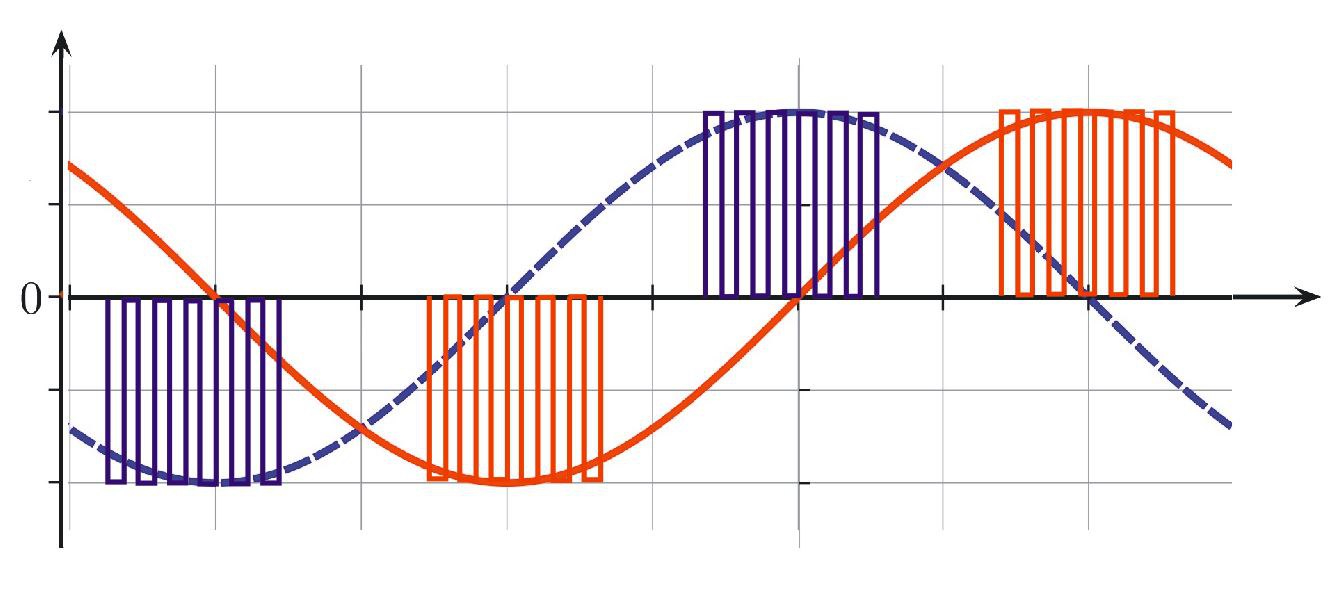
В рассматриваемой любительской схеме мощность двигателя невелика, питание двигателя производится прямоугольными импульсами, поэтому ШИМ достаточно примитивна. В реальных промышленных частотных преобразователях большой мощности ШИМ предназначена для формирования на выходе напряжений практически синусоидальной формы, как показано на рисунке 8, и для реализации работы с различными нагрузками: при постоянном моменте, при постоянной мощности и при вентиляторной нагрузке.
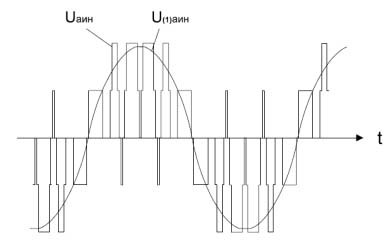
Рисунок 8. Форма выходного напряжения одной фазы трехфазного инвертора с ШИМ.
Силовая часть схемы
Современные фирменные частотники имеют на выходе мощные транзисторы структуры MOSFET или IGBT, специально предназначенные для работы в преобразователях частоты. В ряде случаев эти транзисторы объединены в модули, что в целом улучшает показатели всей конструкции. Управление этими транзисторами производится с помощью специализированных микросхем-драйверов. В некоторых моделях драйверы выпускаются встроенными в транзисторные модули.
Наиболее распространены в настоящее время микросхемы и транзисторы фирмы International Rectifier. В описываемой схеме вполне возможно применить драйверы IR2130 или IR2132. В одном корпусе такой микросхемы содержится сразу шесть драйверов: три для нижнего ключа и три для верхнего, что позволяет легко собрать трехфазный мостовой выходной каскад. Кроме основной функции эти драйверы содержат также несколько дополнительных, например защита от перегрузок и коротких замыканий. Более подробную информацию об этих драйверах можно узнать из технических описаний Data Sheet на соответствующие микросхемы.
При всех достоинствах единственный недостаток этих микросхем их высокая цена, поэтому автор конструкции пошел другим, более простым, дешевым, и в то же время работоспособным путем: специализированные микросхемы-драйверы заменены микросхемами интегрального таймера КР1006ВИ1 (NE555).
Выходные ключи на интегральных таймерах
Если вернуться к рисунку 6, то можно заметить, что схема имеет для каждой из трех фаз выходные сигналы, обозначенные как «Н» и «В». Наличие этих сигналов позволяет раздельно управлять верхними и нижними ключами. Такое разделение позволяет формировать паузу между переключением верхних и нижних ключей при помощи блока управления, а не самими ключами, как было показано в схеме на рисунке 3.
Схема выходных ключей с применением микросхем КР1006ВИ1 (NE555) показана на рисунке 9. Естественно, что для трехфазного преобразователя понадобится три экземпляра таких ключей.
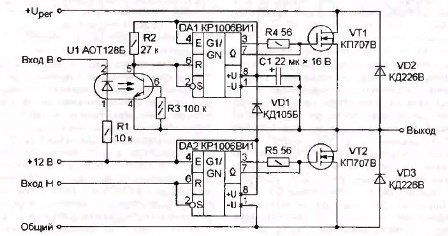
В качестве драйверов верхних (VT1) и нижних (VT2) ключей используются микросхемы КР1006ВИ1, включенные по схеме триггеров Шмидта. С их помощью возможно получить импульсный ток затвора не менее 200мА, что позволяет получить достаточно надежное и быстрое управление выходными транзисторами.
Микросхемы нижних ключей DA2 имеют гальваническую связь с источником питания +12В и, соответственно, с блоком управления, поэтому их питание осуществляется от этого источника. Микросхемы верхних ключей можно запитать так же, как было показано на рисунке 3 с использованием дополнительных выпрямителей и отдельных обмоток на трансформаторе. Но в данной схеме применяется иной, так называемый, «бустрепный» метод питания, смысл которого в следующем. Микросхема DA1 получает питание от электролитического конденсатора C1, заряд которого происходит по цепи: +12В, VD1, C1, открытый транзистор VT2 (через электроды сток – исток), «общий».
Другими словами заряд конденсатора C1 происходит в то время, когда открыт транзистор нижнего ключа. В этот момент минусовой вывод конденсатора С1 оказывается практически накоротко соединен с общим проводом (сопротивление открытого участка «сток – исток» у мощных полевых транзисторов составляет тысячные доли Ома!), что и обеспечивает возможность его заряда.
При закрытом транзисторе VT2 также закроется и диод VD1, заряд конденсатора C1 прекратится до следующего открытия транзистора VT2. Но заряд конденсатора C1 достаточен для питания микросхемы DA1 на время, пока закрыт транзистор VT2. Естественно, что в этот момент транзистор верхнего ключа находится в закрытом состоянии. Данная схема силовых ключей оказалась настолько хороша, что без изменений применяется и в других любительских конструкциях.
В данной статье рассмотрены лишь самые простые схемы любительских трехфазных инверторов на микросхемах малой и средней степени интеграции, с которых все начиналось, и где можно даже по схеме рассмотреть все «изнутри». Более современные конструкции выполнены с применением микроконтроллеров, чаще всего серии PIC, схемы которых также неоднократно публиковались в журналах «Радио».
Микроконтроллерные блоки управления по схеме более просты, чем на микросхемах средней степени интеграции, имеют такие нужные функции, как плавный пуск двигателя, защита от перегрузок и коротких замыканий и некоторые другие. В этих блоках все реализовано за счет управляющих программ или как их принято называть «прошивок». Именно от этих программ и зависит насколько хорошо или плохо будет работать блок управления трехфазного инвертора.
Достаточно простые схемы контроллеров трехфазного инвертора опубликованы в журнале «Радио» 2008 №12. Статья называется «Задающий генератор для трехфазного инвертора». Автор статьи А. Долгий является также автором цикла статей о микроконтроллерах и многих других конструкций. В статье приведены две простых схемы на микроконтроллерах PIC12F629 и PIC16F628.
Частота вращения в обеих схемах изменяется ступенчато с помощью однополюсных переключателей, что вполне достаточно во многих практических случаях. Там же дается ссылка где можно скачать готовые «прошивки», и, более того, специальную программу, с помощью которой можно изменять параметры «прошивок» по своему усмотрению. Возможна также работа генераторов режиме «демо». В этом режиме частота генератора уменьшена в 32 раза, что позволяет визуально с помощью светодиодов наблюдать работу генераторов. Также даются рекомендации по подключению силовой части.
Но, если не хочется заниматься программированием микроконтроллера фирма Motorola выпустила специализированный интеллектуальный контроллер MC3PHAC, предназначенный для систем управления 3-фазным двигателем. На его базе возможно создание недорогих систем регулируемого трехфазного привода, содержащего все необходимые функции для управления и защиты. Подобные микроконтроллеры находят все более широкое применение в различной бытовой технике, например, в посудомоечных машинах или холодильниках.
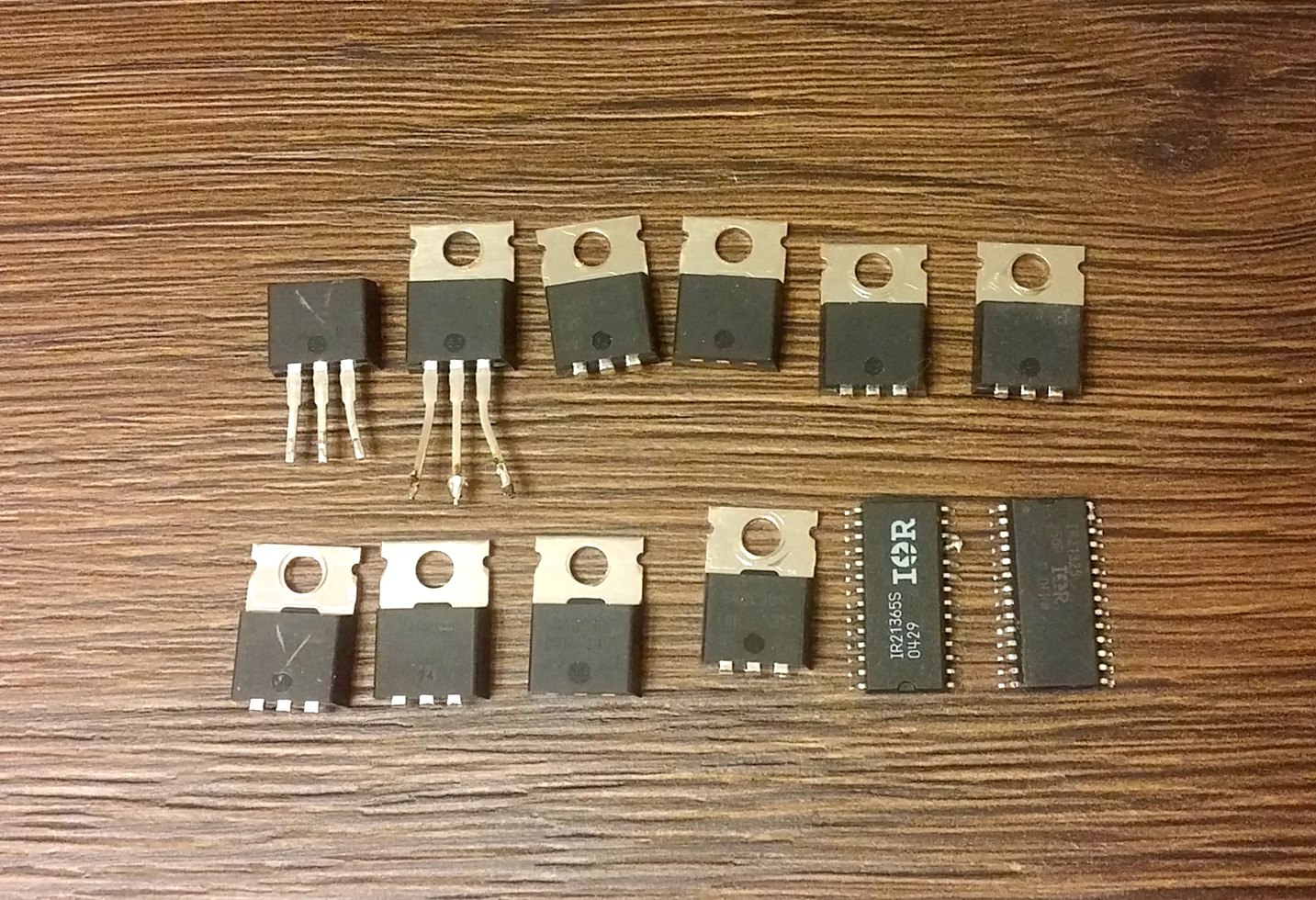
В комплекте с контроллером MC3PHAC возможно использование готовых силовых модулей, например IRAMS10UP60A разработанных фирмой International Rectifier. Модули содержат шесть силовых ключей и схему управления. Более подробно с этими элементами можно в их документации Data Sheet, которую достаточно просто найти в интернете.
Любите умные гаджеты и DIY? Станьте специалистом в сфере Internet of Things и создайте сеть умных гаджетов!
Записывайтесь в онлайн-университет от GeekBrains:

Изучить C, механизмы отладки и программирования микроконтроллеров;
Получить опыт работы с реальными проектами, в команде и самостоятельно;
Получить удостоверение и сертификат, подтверждающие полученные знания.
Starter box для первых экспериментов в подарок!
После прохождения курса в вашем портфолио будет: метостанция с функцией часов и встроенной игрой, распределенная сеть устройств, устройства регулирования температуры (ПИД-регулятор), устройство контроля влажности воздуха, система умного полива растений, устройство контроля протечки воды.
Вы получите диплом о профессиональной переподготовке и электронный сертификат, которые можно добавить в портфолио и показать работодателю.
Читайте также: